Essence
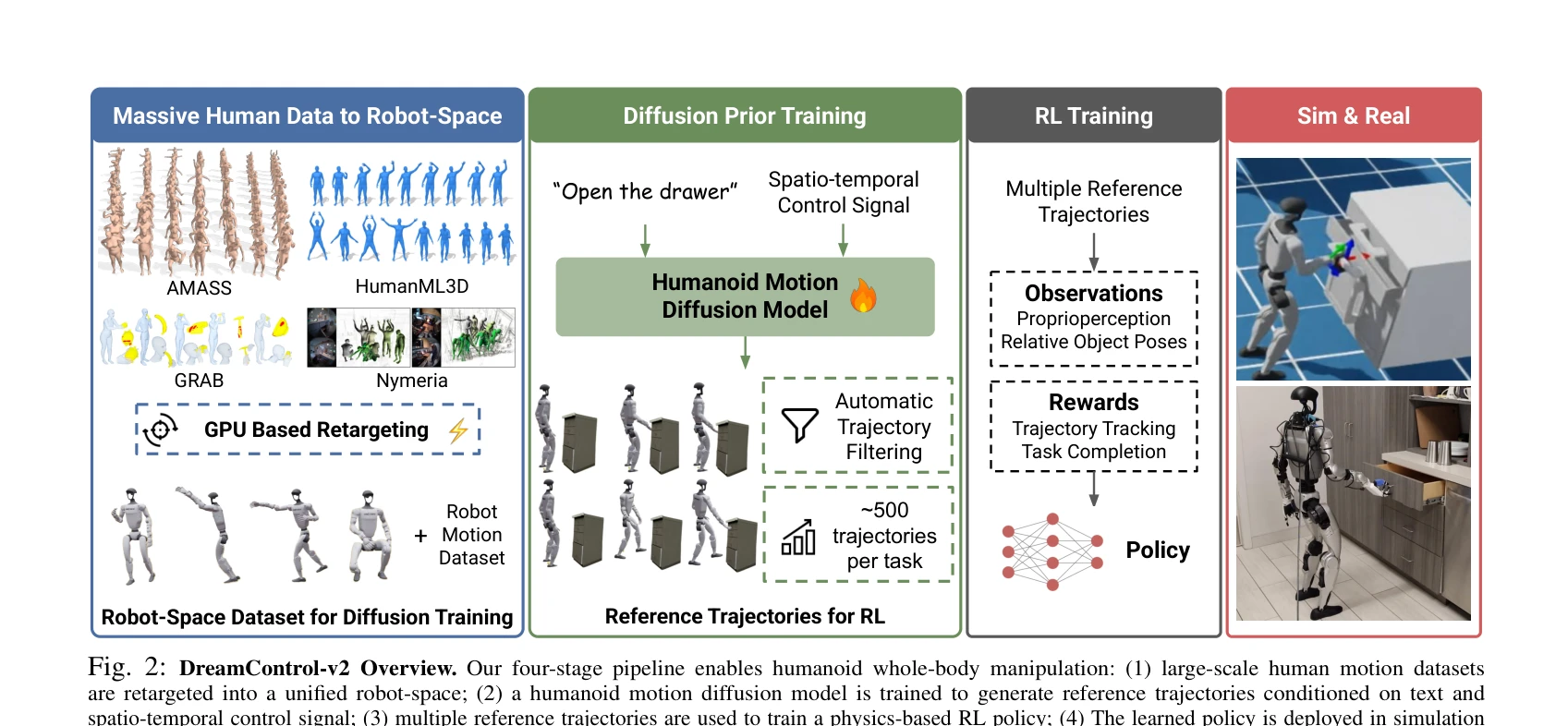
Fig. 2: DreamControl-v2 Overview. Our four-stage pipeline enables humanoid whole-body manipulation: (1) large-scale huma
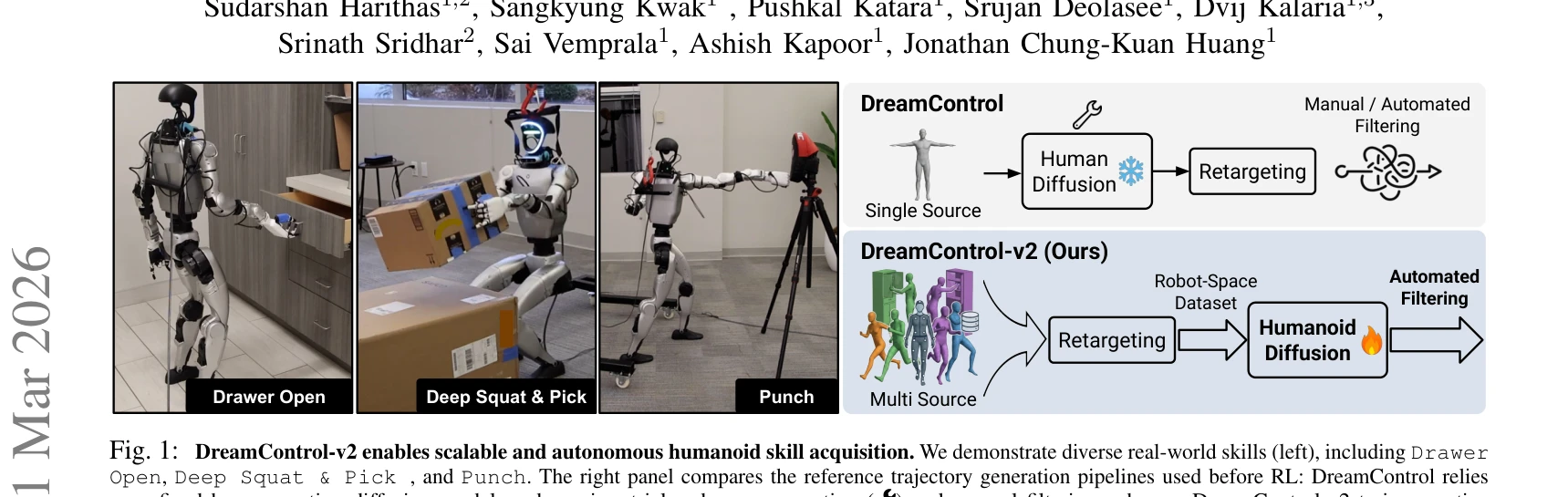
humanoid 로봇의 복잡한 manipulation 작업을 위해 guided diffusion 모델을 로봇의 motion space에 직접 학습하여, 다양한 인간과 로봇 데이터를 통합하고 RL 정책을 자동으로 생성하는 확장 가능한 프레임워크를 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: DreamControl-v2는 robot-space diffusion prior 훈련이라는 명확한 아이디어로 기존의 확장성 문제를 근본적으로 해결하며, 자동화된 파이프라인과 다양한 skill 습득을 통해 humanoid 로봇의 자율적 loco-manipulation에 실질적인 진전을 이루었다. 다만 다중 로봇 embodiment 일반화와 실제 환경에서의 광범위한 검증이 추가되면 더욱 강력한 기여가 될 것이다.