Essence
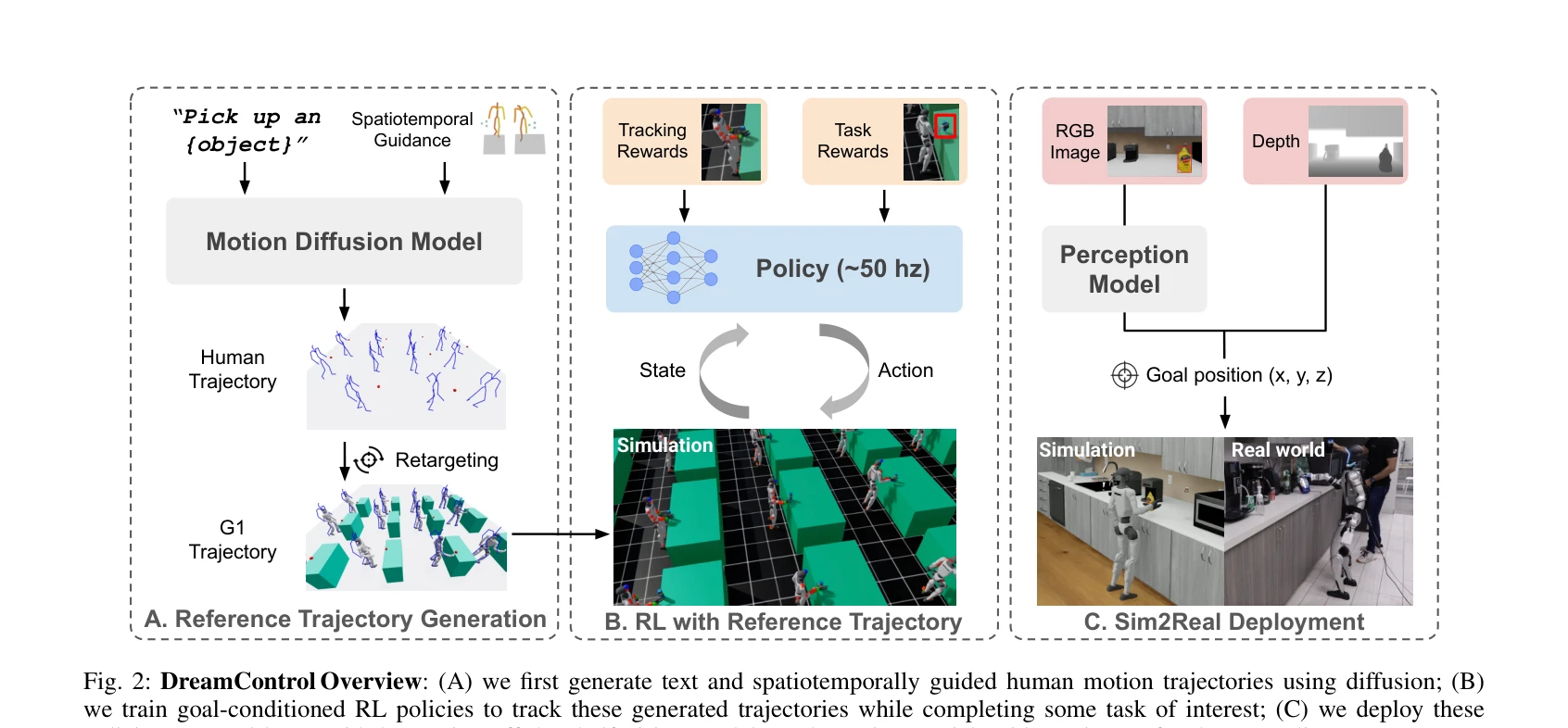
Fig. 2: DreamControl Overview: (A) we first generate text and spatiotemporally guided human motion trajectories using di
DreamControl은 human motion 기반 diffusion prior를 RL과 결합하여 humanoid robot의 whole-body 조작 작업을 학습하는 방법론을 제안한다.
저자: Dvij Kalaria, Sudarshan S. Harithas, Pushkal Katara, Sangkyung Kwak, Sarthak Bhagat, Shankar Sastry, Srinath Sridhar, Sai Vemprala, Ashish Kapoor, Jonathan Chung-Kuan Huang | 날짜: 2025-09-30 | DOI: 10.48550/arXiv.2509.14353 📄 PDF
Fig. 2: DreamControl Overview: (A) we first generate text and spatiotemporally guided human motion trajectories using di
DreamControl은 human motion 기반 diffusion prior를 RL과 결합하여 humanoid robot의 whole-body 조작 작업을 학습하는 방법론을 제안한다.
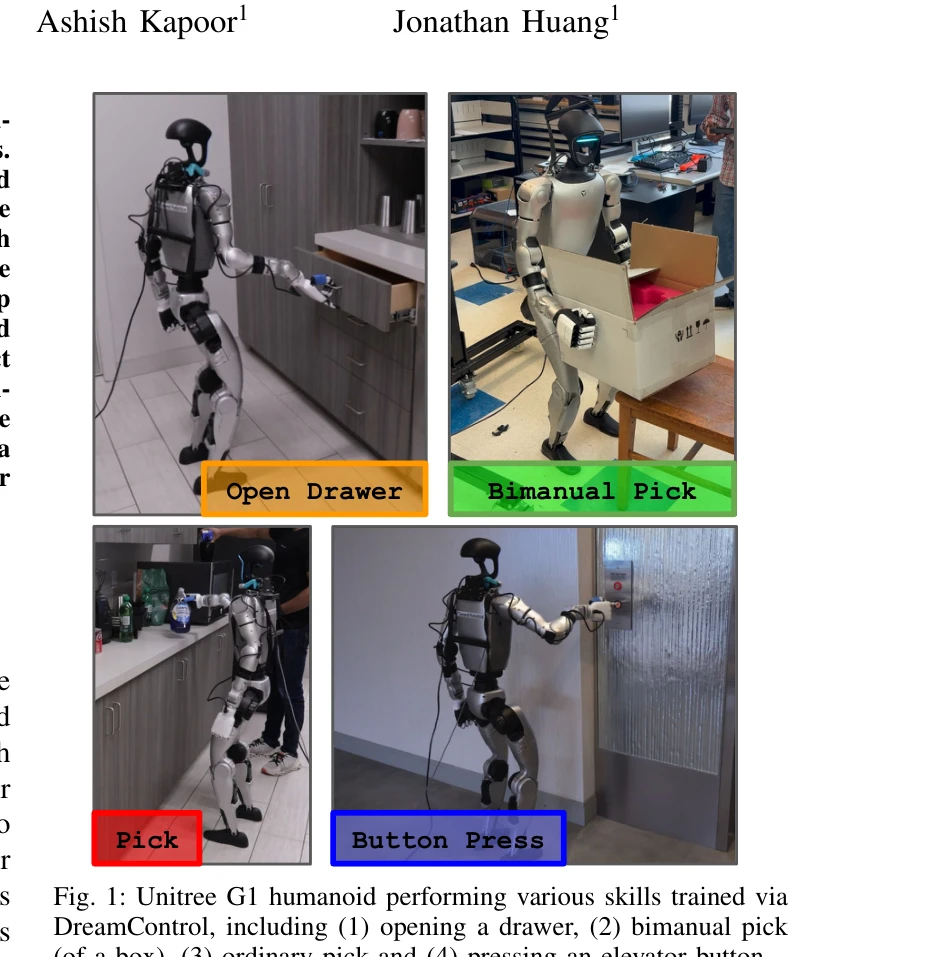
Fig. 1: Unitree G1 humanoid performing various skills trained via
Fig. 2: DreamControl Overview: (A) we first generate text and spatiotemporally guided human motion trajectories using di
총평: DreamControl은 human motion diffusion prior와 RL의 장점을 효과적으로 결합하여 humanoid robot의 whole-body manipulation을 학습하는 창의적이고 실용적인 방법론을 제시하며, 실제 로봇에서의 다양한 작업 수행으로 그 가치를 입증했다.