Essence
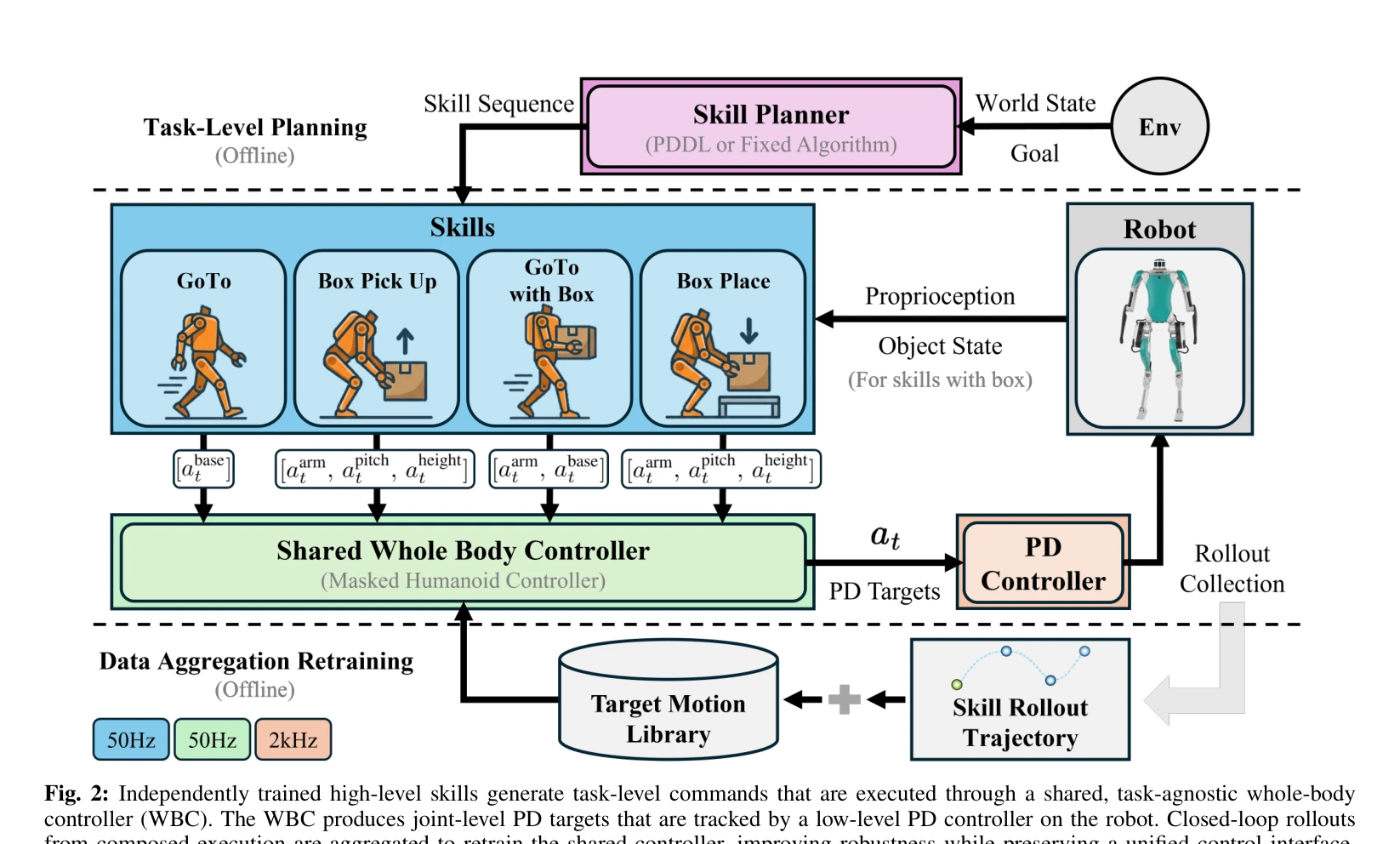
Fig. 2: Independently trained high-level skills generate task-level commands that are executed through a shared, task-ag
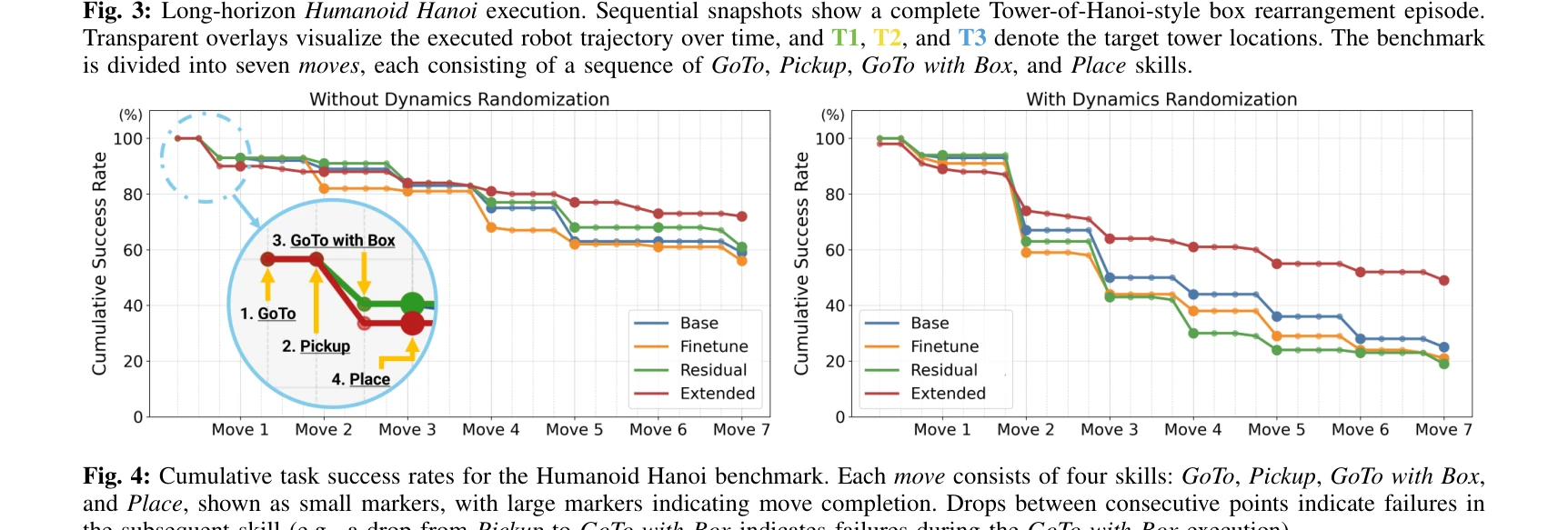
휴머노이드 로봇의 장기 박스 재배열 작업을 위해 공유된 task-agnostic WBC를 통해 재사용 가능한 스킬들을 조합하는 skill-based framework를 제안하고, 분포 이동으로 인한 강건성 저하를 데이터 집계를 통해 해결한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 공유 WBC를 통한 모듈식 스킬 조합 아키텍처의 systematic exploration과 데이터 집계 기반 robustness 개선이라는 실용적 기여를 제시하며, Humanoid Hanoi 벤치마크를 통해 long-horizon 장기 자율 실행의 가능성을 입증한다. 다만 high-level planning, 계산 scalability, sim-to-real gap에 대한 심화 분석은 부족하다.