Essence
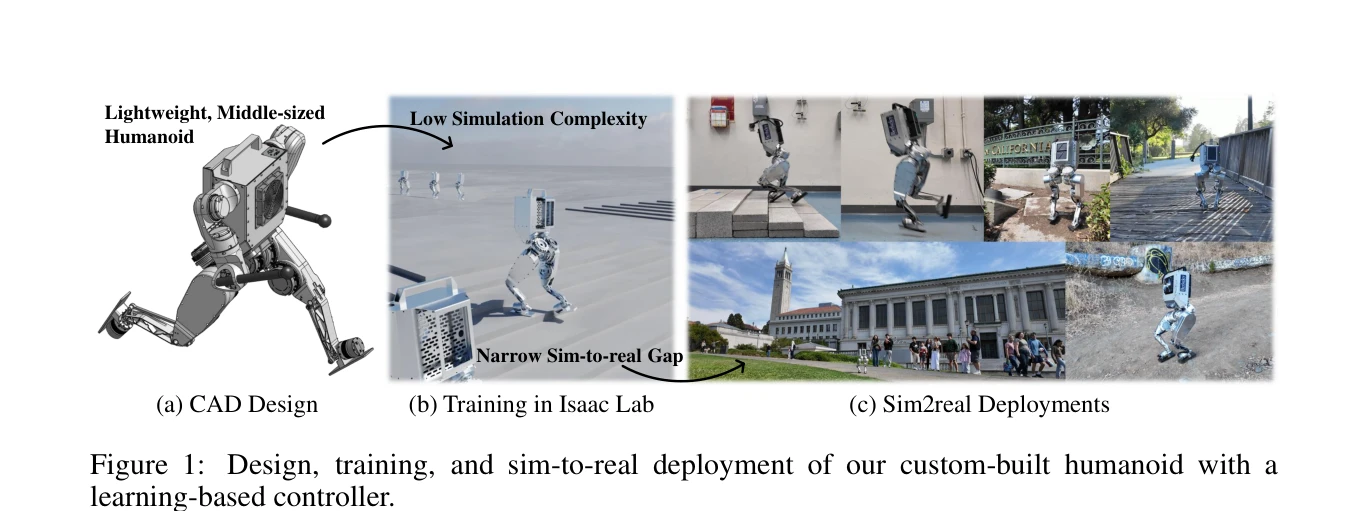
Figure 1: Design, training, and sim-to-real deployment of our custom-built humanoid with a
학습 기반 제어를 위해 특별히 설계된 저비용 중형 휴머노이드 로봇 플랫폼인 Berkeley Humanoid를 제시하며, 좁은 sim-to-real 갭과 높은 신뢰성으로 다양한 지형에서 동적 보행을 실현한다.
저자: Qiayuan Liao, Bike Zhang, Xuanyu Huang, Xiaoyu Huang, Zhongyu Li, Koushil Sreenath | 날짜: 2024-07-31 | URL: https://arxiv.org/abs/2407.21781 📄 PDF
Figure 1: Design, training, and sim-to-real deployment of our custom-built humanoid with a
학습 기반 제어를 위해 특별히 설계된 저비용 중형 휴머노이드 로봇 플랫폼인 Berkeley Humanoid를 제시하며, 좁은 sim-to-real 갭과 높은 신뢰성으로 다양한 지형에서 동적 보행을 실현한다.
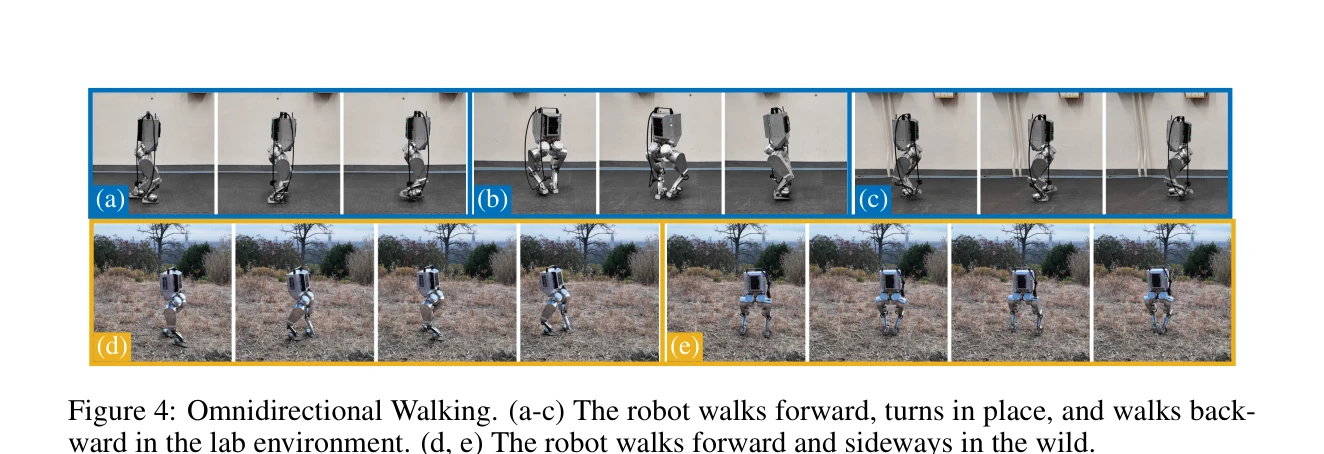
Figure 4: Omnidirectional Walking. (a-c) The robot walks forward, turns in place, and walks back-
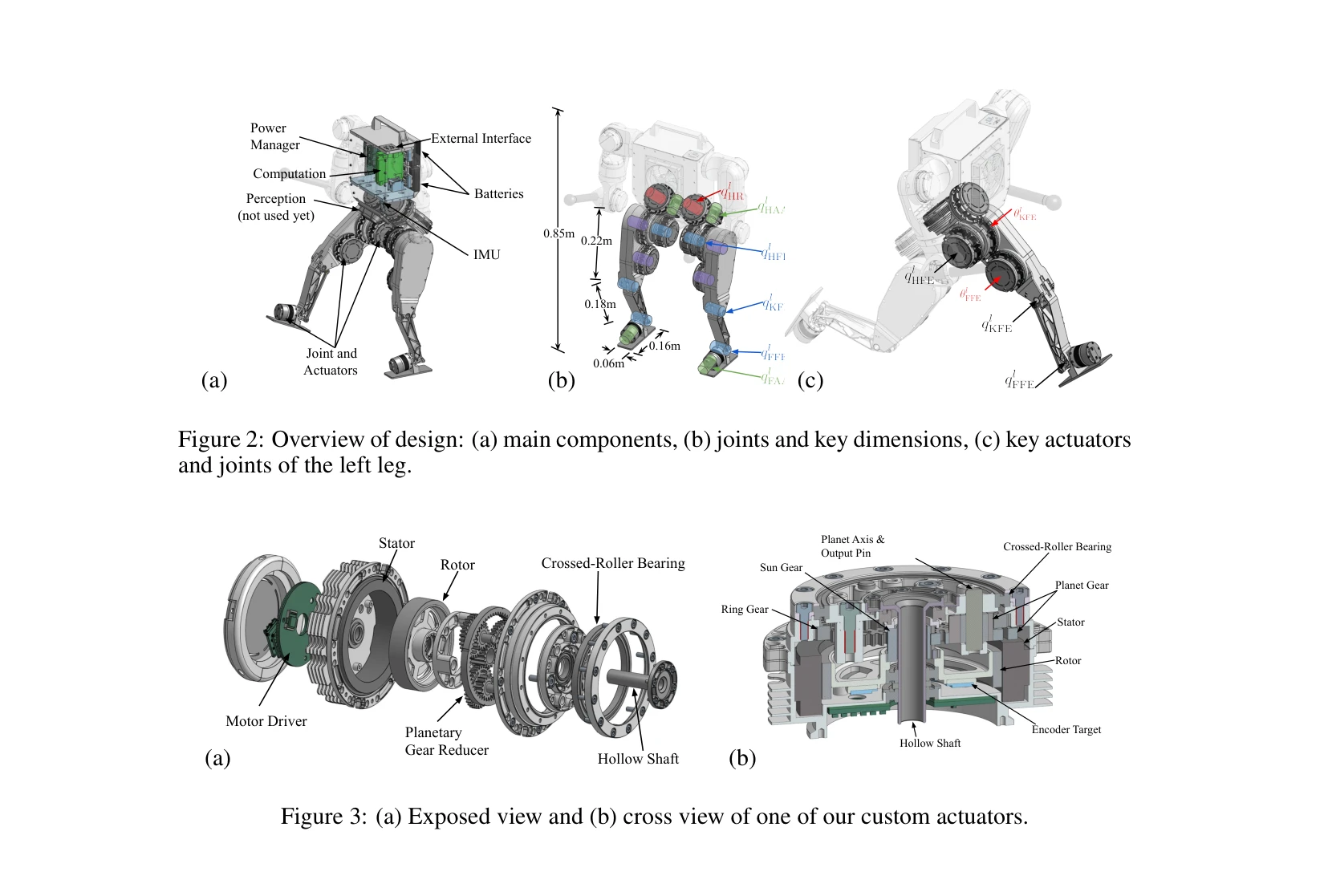
Figure 2: Overview of design: (a) main components, (b) joints and key dimensions, (c) key actuators
총평: Berkeley Humanoid는 학습 기반 휴머노이드 제어 연구를 위한 실용적이고 비용 효율적인 플랫폼으로, 하드웨어와 제어 알고리즘의 통합 설계를 통해 중요한 sim-to-real 문제를 해결한 가치 있는 기여이다. Open-source 공개 계획은 커뮤니티 연구를 촉진할 것으로 예상된다.