저자: Ruiqian Nai, Boyuan Zheng, Junming Zhao, Haodong Zhu, Sicong Dai, Zunhao Chen, Yihang Hu, Yingdong Hu, Tong Zhang, Chuan Wen, Yang Gao | 날짜: 2026-02-12 | DOI: 10.48550/arXiv.2602.06643 📄 PDF
Essence
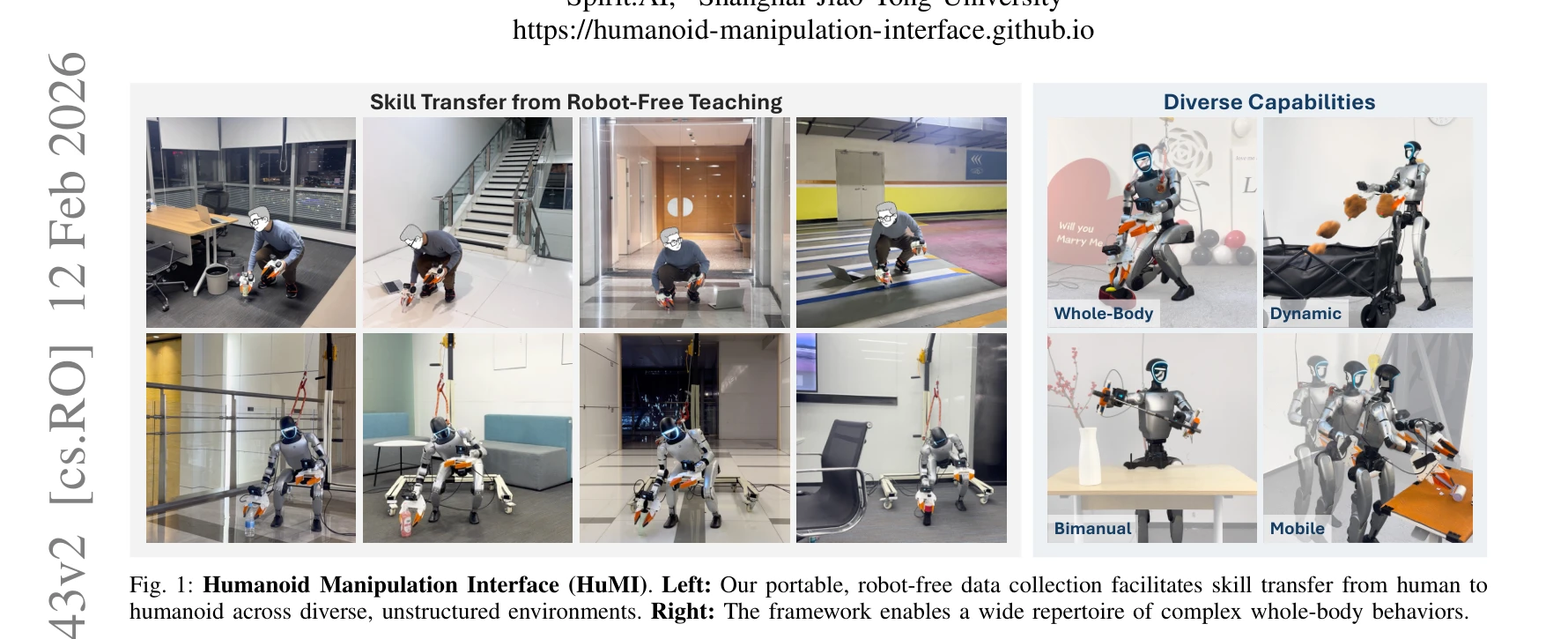
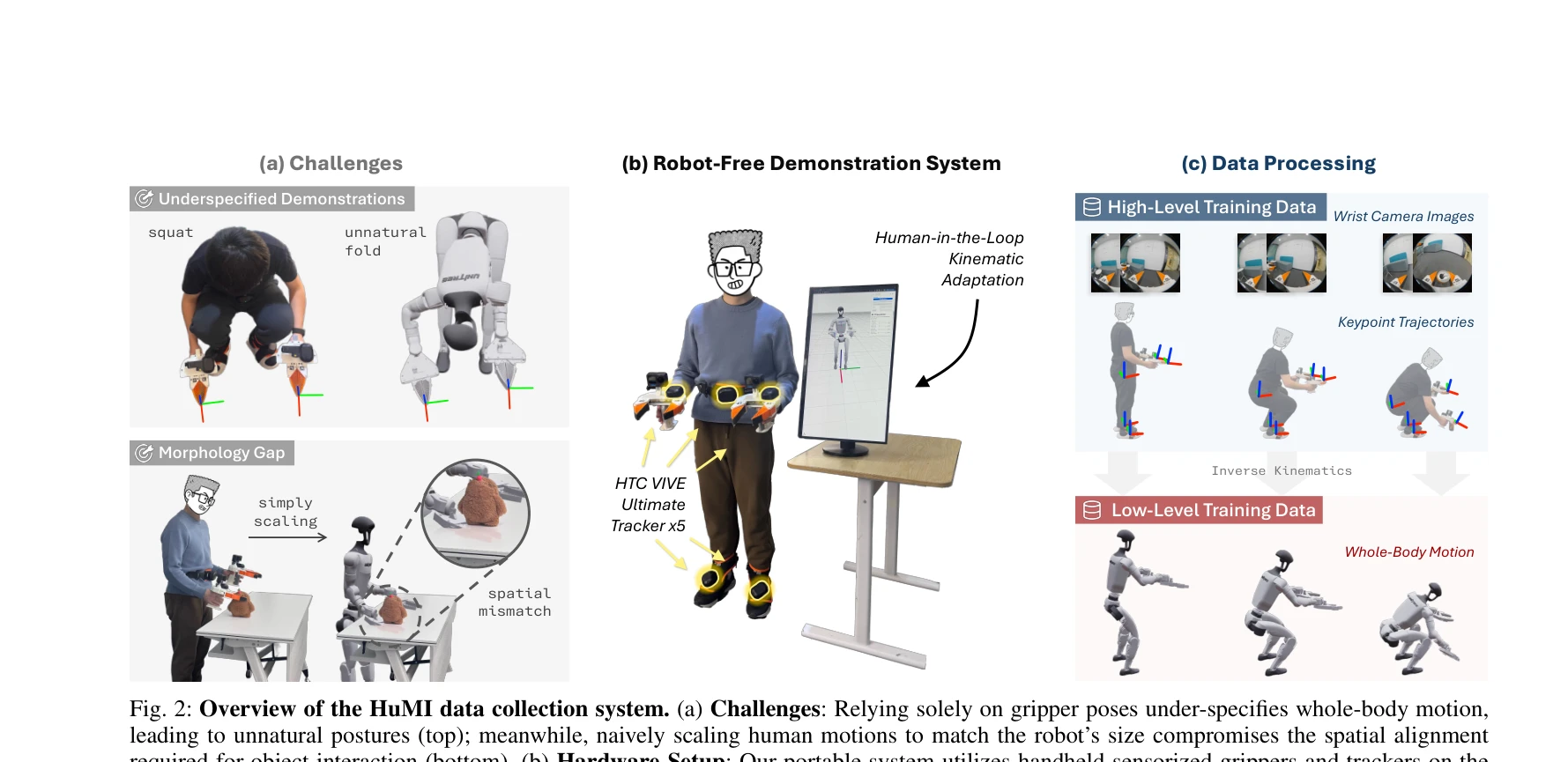
Fig. 1: Humanoid Manipulation Interface (HuMI). Left: Our portable, robot-free data collection facilitates skill transfe
HuMI는 로봇 없이 휴대용 하드웨어로 수집한 인간 전신 동작 데이터를 이용해 인형형 로봇에게 다양한 전신 조작 기술을 학습시키는 프레임워크이다. 계층적 학습 파이프라인과 IK 기반 적응을 통해 인간-로봇 간 신체형 차이를 극복하고 70% 성공률을 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: HuMI는 로봇 없는 휴대용 데이터 수집과 계층적 학습을 결합하여 인형형 로봇의 전신 조작을 효율적으로 학습시키는 혁신적인 프레임워크이다. 3배 높은 데이터 수집 효율과 미지 환경에서의 강한 일반화는 로봇 학습의 실용성을 크게 향상시키며, 신체형 차이 극복을 위한 체계적 접근법이 학문적 기여도 크다.