Essence
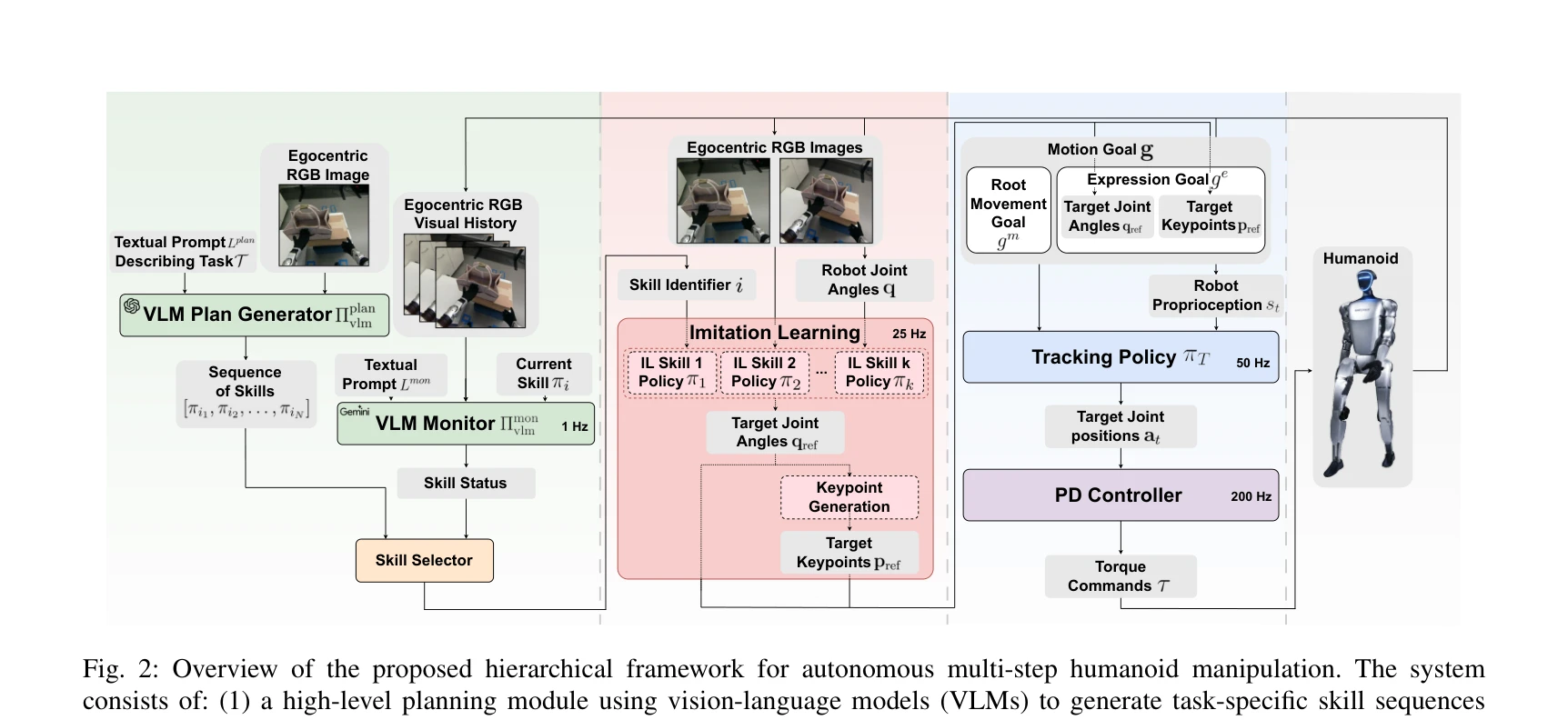
Fig. 2: Overview of the proposed hierarchical framework for autonomous multi-step humanoid manipulation. The system
인간형 로봇의 복잡한 다단계 조작 작업을 위해 저수준 RL 추적 제어기, 중수준 모방학습 기반 스킬 정책, 고수준 VLM 기반 계획 및 모니터링으로 구성된 3계층 계층적 프레임워크를 제시한다.
저자: André Schakkal, Ben Zandonati, Zhutian Yang, Navid Azizan | 날짜: 2025-06-28 | URL: https://arxiv.org/abs/2506.22827 📄 PDF
Fig. 2: Overview of the proposed hierarchical framework for autonomous multi-step humanoid manipulation. The system
인간형 로봇의 복잡한 다단계 조작 작업을 위해 저수준 RL 추적 제어기, 중수준 모방학습 기반 스킬 정책, 고수준 VLM 기반 계획 및 모니터링으로 구성된 3계층 계층적 프레임워크를 제시한다.
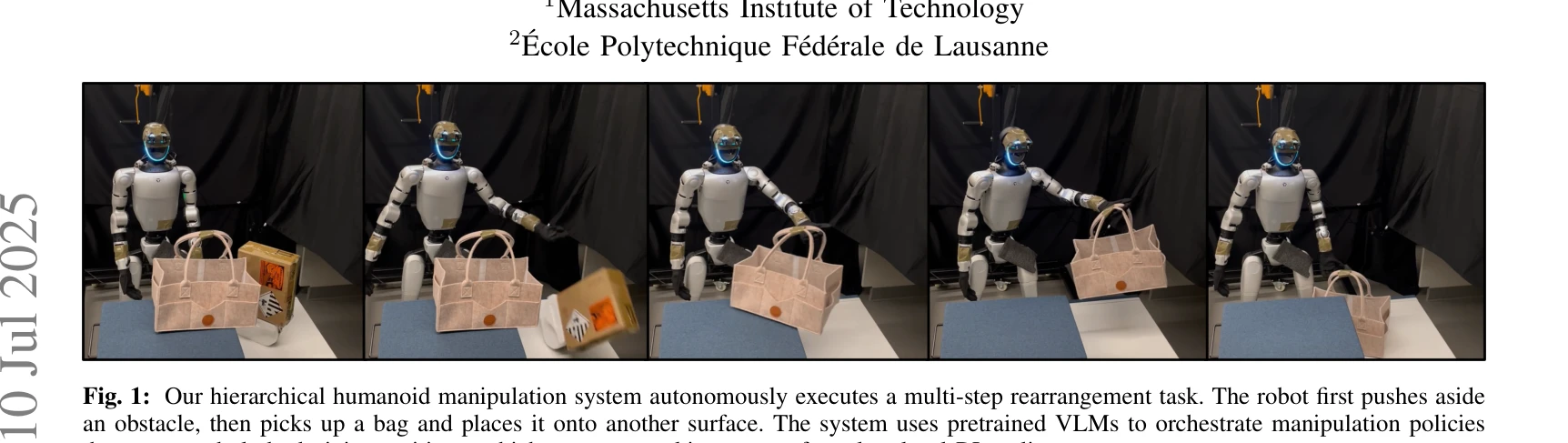
Fig. 1: Our hierarchical humanoid manipulation system autonomously executes a multi-step rearrangement task. The robot f
Fig. 2: Overview of the proposed hierarchical framework for autonomous multi-step humanoid manipulation. The system
총평: 본 논문은 humanoid 로봇의 자율적 다단계 조작을 위해 VLM 기반 계획 및 모니터링을 기존 2계층 제어에 추가하는 실용적인 접근을 제시하며, 실제 로봇 시험으로 기술적 가능성을 입증했다. 다만 73% 성공률과 단일 작업 검증은 추후 개선이 필요한 부분이다.