저자: Qiang Zhang, Zhang Zhang, Wei Cui, Jingkai Sun, Jiahang Cao, Yijie Guo, Gang Han, Wen Zhao, Jiaxu Wang, Chenghao Sun, Lingfeng Zhang, Hao Cheng, Yujie Chen, Lin Wang, Jian Tang, Renjing Xu | 날짜: 2025-03-12 | URL: https://arxiv.org/abs/2503.09010 📄 PDF
Essence
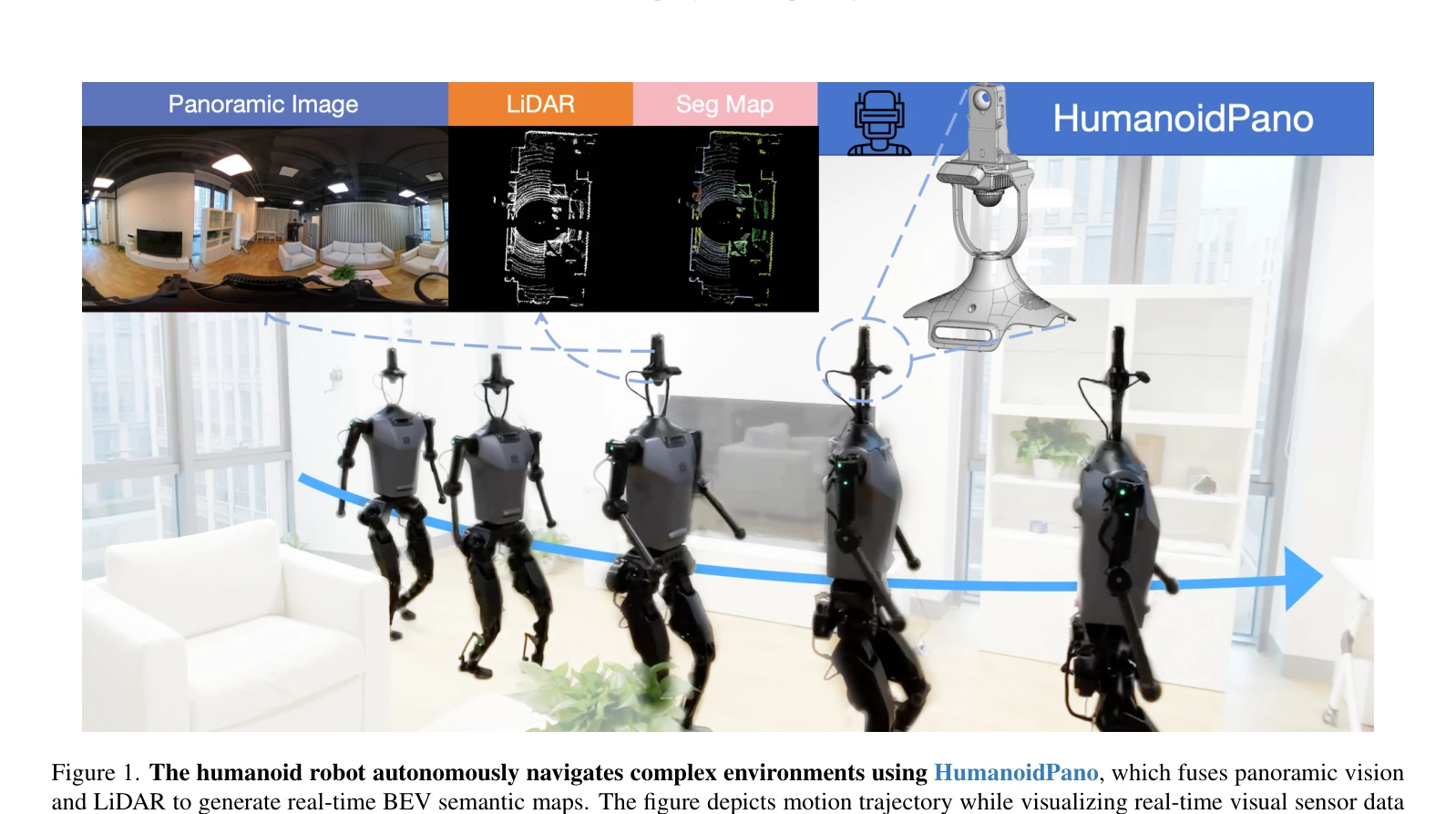
Figure 1. The humanoid robot autonomously navigates complex environments using HumanoidPano, which fuses panoramic visio
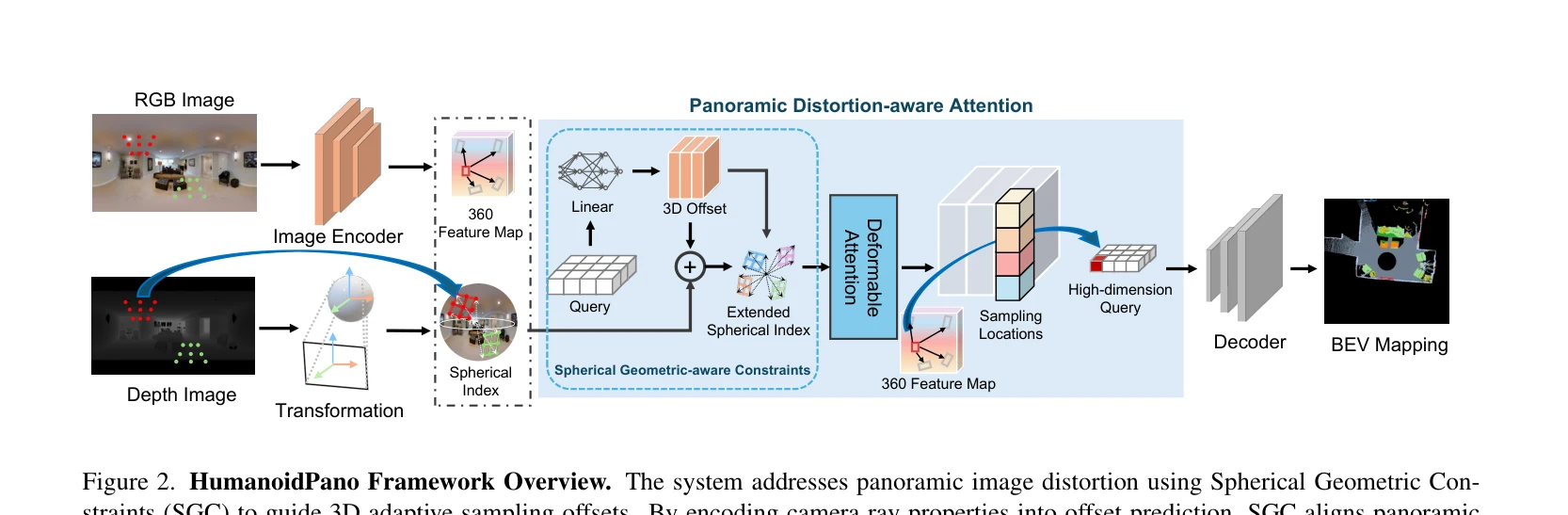
인간형 로봇의 자아-폐색 및 제한된 시야 문제를 해결하기 위해 파노라마 비전과 LiDAR를 융합하는 HumanoidPano 프레임워크를 제안하며, Spherical Geometry-aware Constraints와 Spatial Deformable Attention을 통해 기하학적으로 정렬된 크로스모달 인식을 구현한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: HumanoidPano는 인간형 로봇의 고유한 구조적 제약을 심층적으로 고려하여 panoramic vision과 LiDAR를 기하학적으로 정렬하는 혁신적인 프레임워크로, 실제 로봇 플랫폼에서의 검증과 state-of-the-art 성능으로 embodied AI 분야에 새로운 패러다임을 제시한다.