Essence
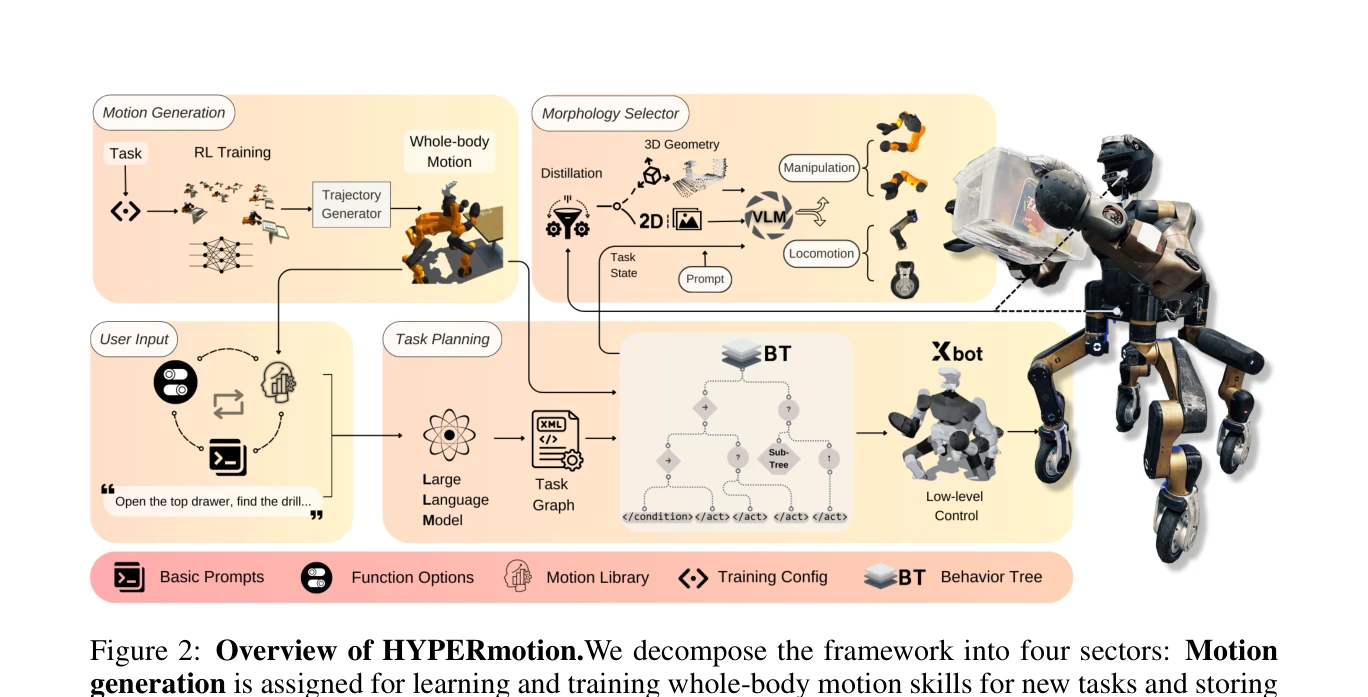
Figure 2: Overview of HYPERmotion.We decompose the framework into four sectors: Motion
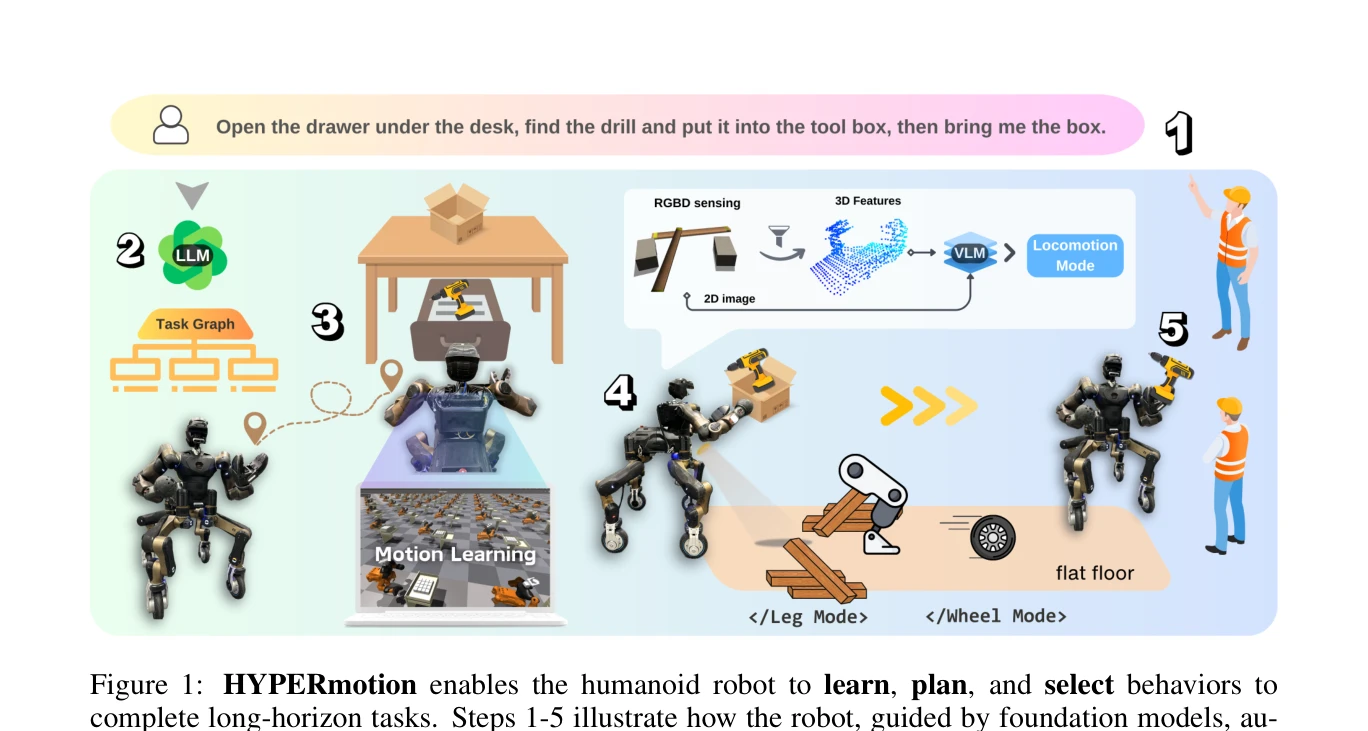
HYPERmotion은 강화학습과 최적화를 결합하여 휴머노이드 로봇이 자연어 명령으로부터 복잡한 로코-조작 작업을 자율적으로 수행할 수 있도록 하는 계층적 행동 계획 프레임워크이다. LLM과 VLM을 활용하여 의미론적 지시를 원시 행동 기술로 변환하고 동적 환경에서 형태론적 선택을 수행한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: HYPERmotion은 고자유도 휴머노이드 로봇의 자율적 로코-조작을 자연어 명령으로부터 수행하는 포괄적이고 실용적인 프레임워크를 제시하며, 특히 LLM/VLM과 로봇 제어의 통합, 실제 로봇 배포 실현은 해당 분야에서 의미 있는 진전을 보여준다. 다만 계산 복잡도, 환경 적응성, 완전한 자동화 측면에서 개선 여지가 있다.