Essence
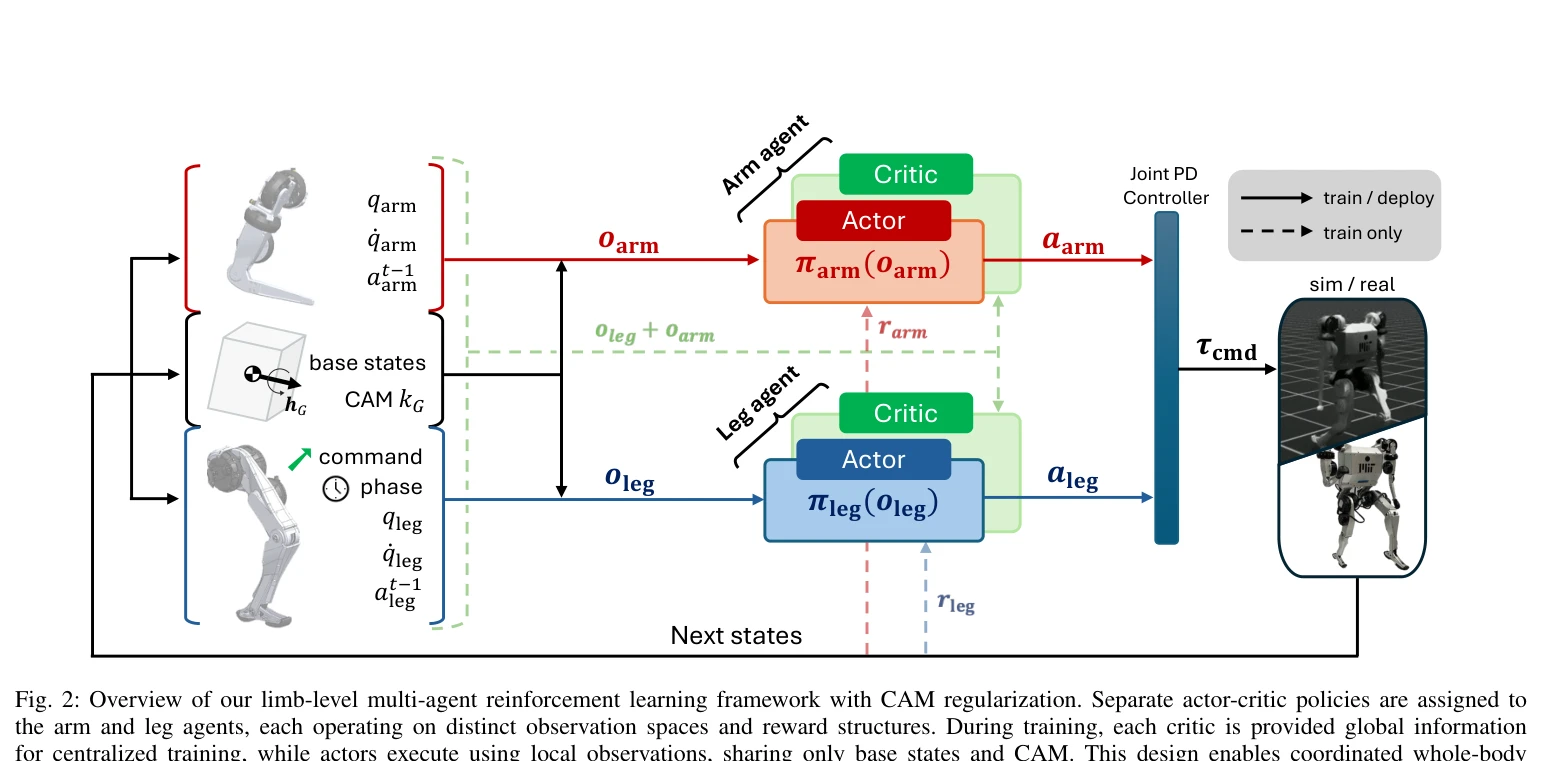
Fig. 2: Overview of our limb-level multi-agent reinforcement learning framework with CAM regularization. Separate actor-
인간의 팔 스윙 운동에서 영감을 받아, centroidal angular momentum (CAM) 추적 보상을 통해 다리와 팔을 별도의 에이전트로 취급하는 multi-agent RL 프레임워크를 제시하여 휴머노이드 로봇의 협응 제어를 달성한다.