Essence
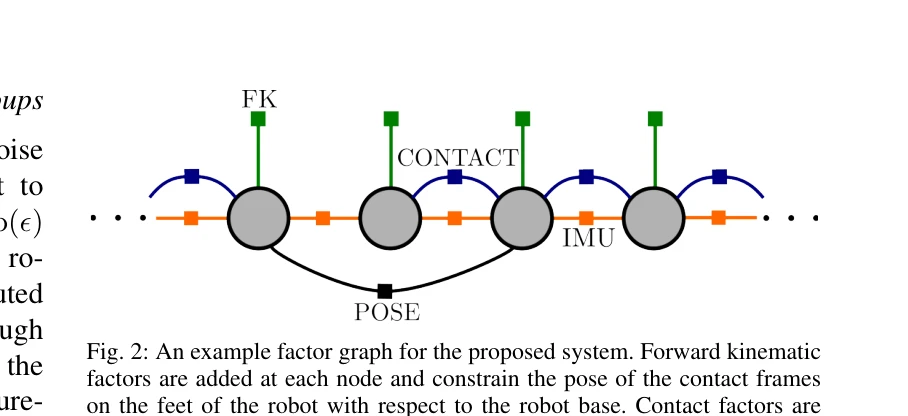
Fig. 2: An example factor graph for the proposed system. Forward kinematic
시각 추적 손실 시에도 작동하는 다리 로봇 상태 추정 기법으로, Forward Kinematic 인수와 Preintegrated Contact 인수를 Factor Graph에 통합하여 엔코더 측정과 접촉 정보를 활용한다.
저자: Ross Hartley, Josh Mangelson, Lu Gan, Maani Ghaffari Jadidi, Jeffrey M. Walls, Ryan M. Eustice, Jessy W. Grizzle | 날짜: 2017-12-15 | URL: https://arxiv.org/abs/1712.05873 📄 PDF
Fig. 2: An example factor graph for the proposed system. Forward kinematic
시각 추적 손실 시에도 작동하는 다리 로봇 상태 추정 기법으로, Forward Kinematic 인수와 Preintegrated Contact 인수를 Factor Graph에 통합하여 엔코더 측정과 접촉 정보를 활용한다.
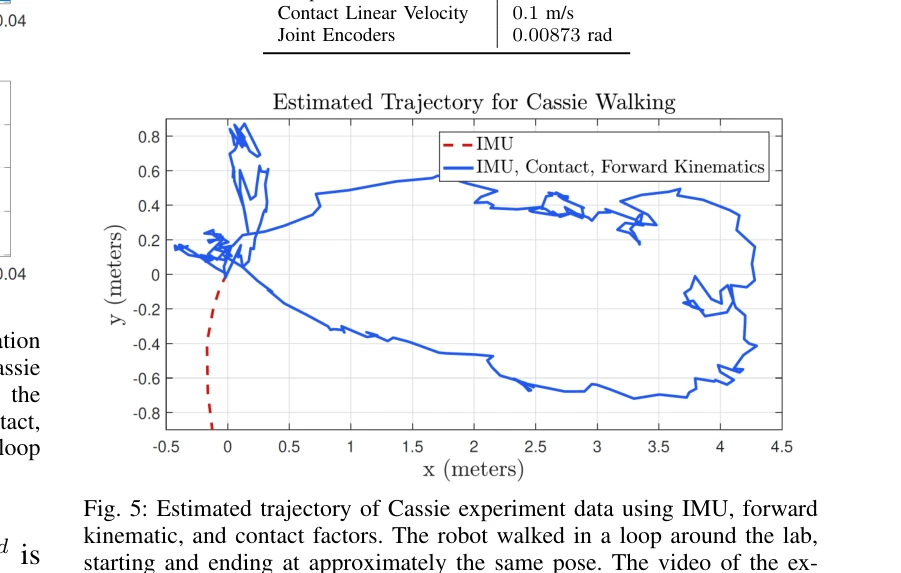
Fig. 5: Estimated trajectory of Cassie experiment data using IMU, forward
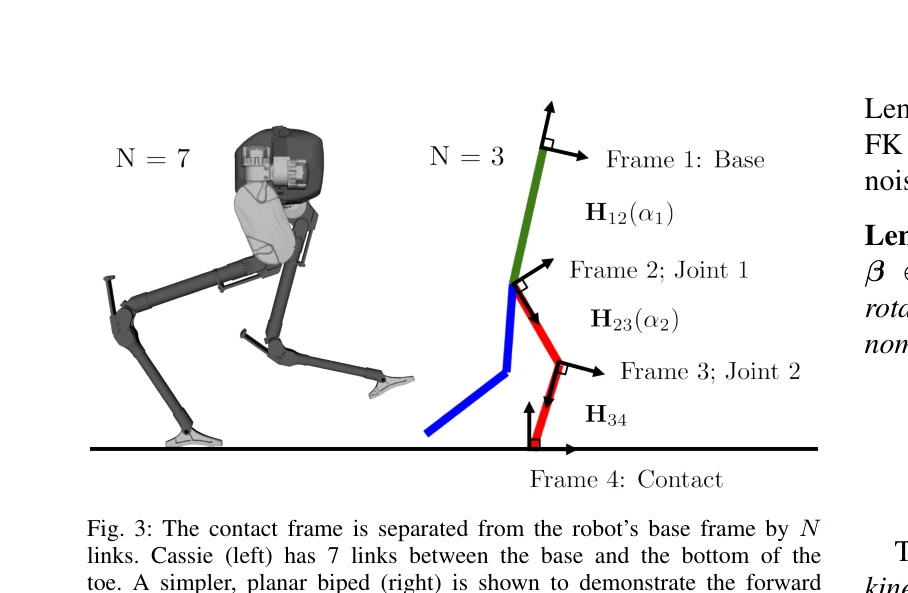
Fig. 3: The contact frame is separated from the robot’s base frame by N
총평: 본 논문은 Factor Graph 프레임워크에 Forward Kinematic 및 Preintegrated Contact 인수를 처음 도입하여 시각 손실 상황에서도 다리 로봇의 상태를 추정할 수 있는 실용적 기법을 제시했으며, 이론적 엄밀성과 실제 로봇 구현 양면에서 견고한 기여를 하지만, 실험의 규모가 제한적이고 일반화 가능성 검증이 필요하다.