Essence
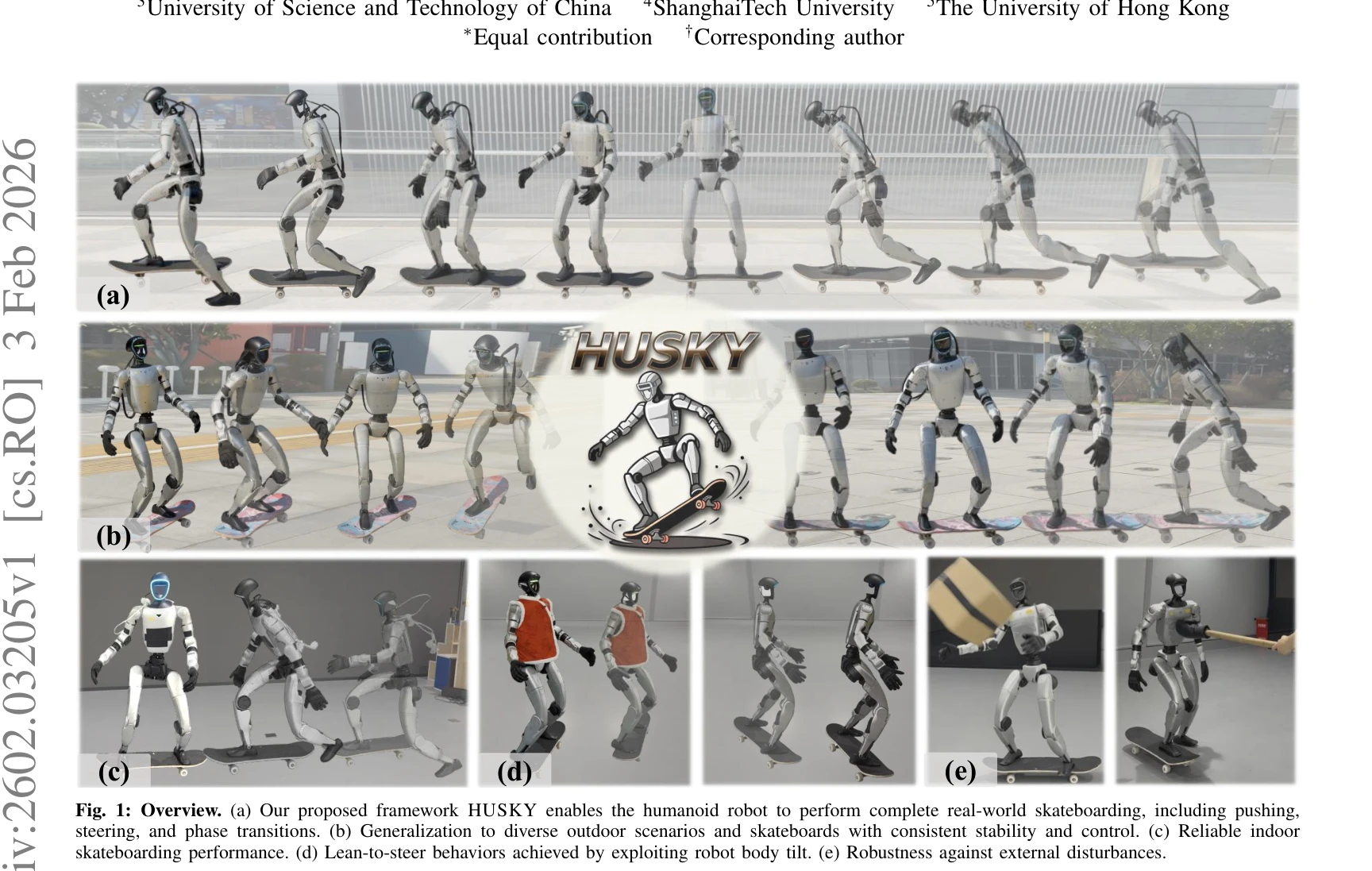
Fig. 1: Overview. (a) Our proposed framework HUSKY enables the humanoid robot to perform complete real-world skateboardi
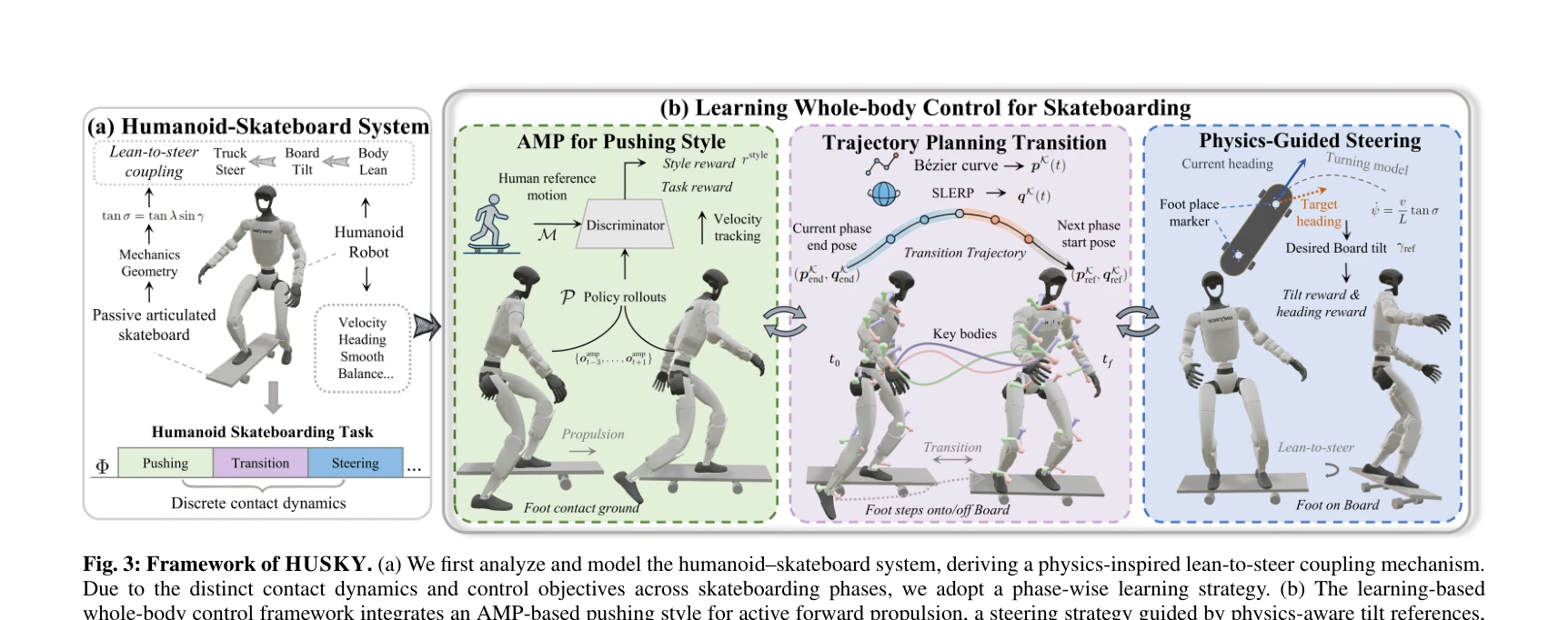
HUSKY는 humanoid 로봇이 skateboard 위에서 안정적으로 skating을 수행하기 위한 physics-aware whole-body control 프레임워크이며, lean-to-steer 제약과 hybrid contact dynamics를 명시적으로 모델링하여 AMP 기반 pushing과 physics-guided steering을 통합한다.