Essence
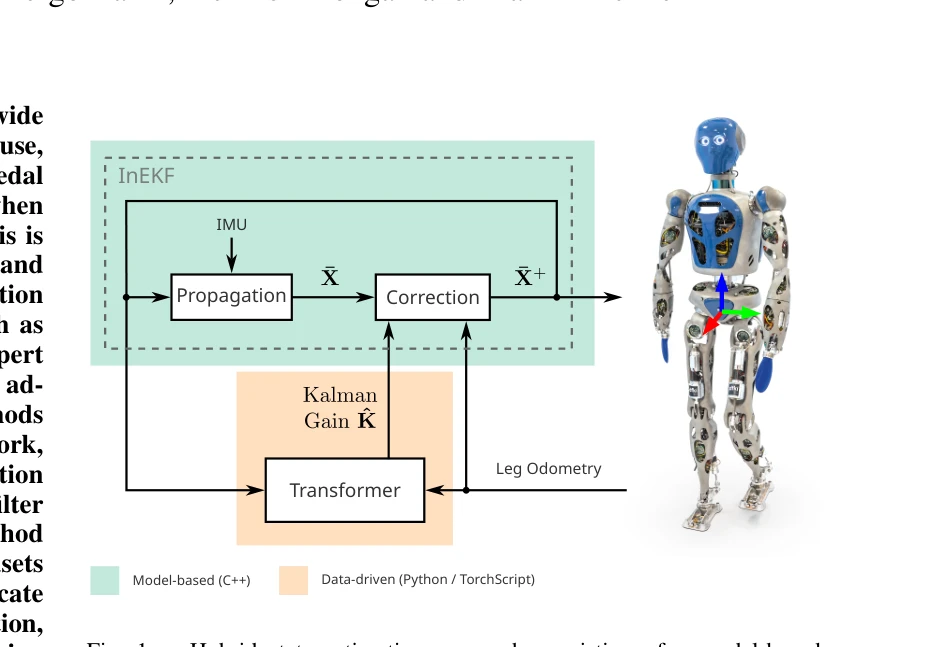
Fig. 1.
InEKFormer는 Invariant Extended Kalman Filter(InEKF)와 Transformer 네트워크를 결합한 하이브리드 상태 추정 방법으로, 인간형 로봇의 floating base 상태를 정확하게 추정한다.
저자: Lasse Hohmeyer, Mihaela Popescu, Ivan Bergonzani, Dennis Mronga, Frank Kirchner | 날짜: 2025-11-20 | URL: https://arxiv.org/abs/2511.16306 📄 PDF
Fig. 1.
InEKFormer는 Invariant Extended Kalman Filter(InEKF)와 Transformer 네트워크를 결합한 하이브리드 상태 추정 방법으로, 인간형 로봇의 floating base 상태를 정확하게 추정한다.
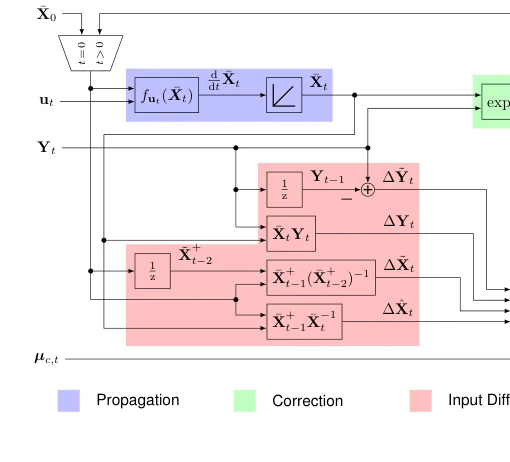
Fig. 2.
Fig. 2.
총평: 본 논문은 InEKF와 Transformer를 내부적으로 결합한 novel hybrid 방법을 제시하고 인간형 로봇에 처음 적용함으로써 상태 추정 분야에 기여하나, autoregressive 학습의 안정성 문제와 일반화에 대한 보다 심층적인 분석이 필요하다.