Essence
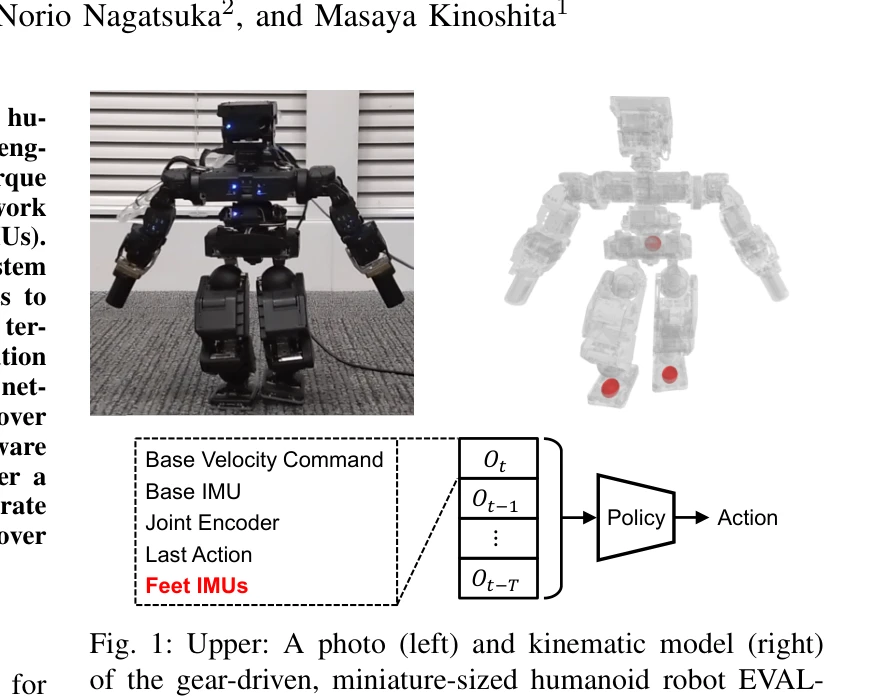
Fig. 1: Upper: A photo (left) and kinematic model (right)
고기어비 액추에이터와 토크 센서가 없는 휴머노이드 로봇의 이족 보행 학습을 위해 발목 장착 IMU를 활용하는 Sim-to-Real RL 프레임워크를 제안하고, 대칭 데이터 증강과 random network distillation을 통해 불규칙한 지형에서의 안정화를 향상시킨다.
저자: Sotaro Katayama, Yuta Koda, Norio Nagatsuka, Masaya Kinoshita | 날짜: 2025-04-01 | URL: https://arxiv.org/abs/2504.00614 📄 PDF
Fig. 1: Upper: A photo (left) and kinematic model (right)
고기어비 액추에이터와 토크 센서가 없는 휴머노이드 로봇의 이족 보행 학습을 위해 발목 장착 IMU를 활용하는 Sim-to-Real RL 프레임워크를 제안하고, 대칭 데이터 증강과 random network distillation을 통해 불규칙한 지형에서의 안정화를 향상시킨다.
Fig. 1: Upper: A photo (left) and kinematic model (right)
총평: 본 논문은 저비용 고기어비 액추에이터 로봇의 Sim-to-Real 학습에서 발목 IMU 센서를 혁신적으로 활용하여 복잡한 모델링을 회피하면서도 강건한 이족 보행을 달성한다. 하드웨어 검증과 실제 성능 개선이 입증되었으나, 다양한 로봇 플랫폼으로의 일반화 가능성과 기여도 분석이 향후 강화될 필요가 있다.