Essence
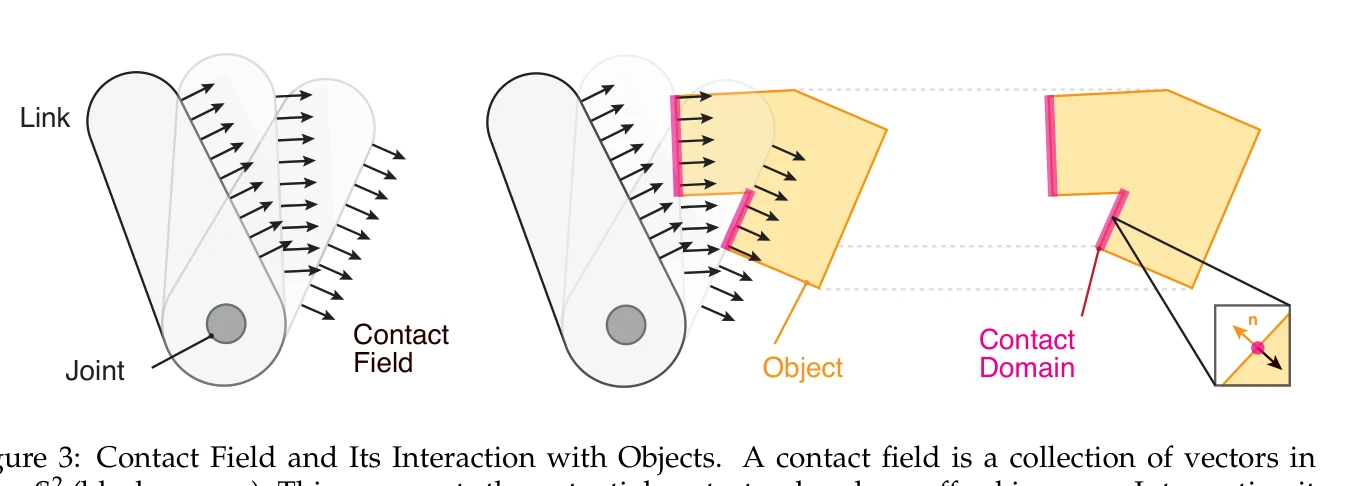
Figure 3: Contact Field and Its Interaction with Objects. A contact field is a collection of vectors in
Lightning Grasp는 Contact Field라는 새로운 데이터 구조를 도입하여 기하학적 계산과 최적화 과정을 분리함으로써 다지형 손을 위한 고속의 절차적 파지 합성을 실현한다.
저자: Zhao-Heng Yin, Pieter Abbeel | 날짜: 2025-11-10 | URL: https://arxiv.org/abs/2511.07418 📄 PDF
Figure 3: Contact Field and Its Interaction with Objects. A contact field is a collection of vectors in
Lightning Grasp는 Contact Field라는 새로운 데이터 구조를 도입하여 기하학적 계산과 최적화 과정을 분리함으로써 다지형 손을 위한 고속의 절차적 파지 합성을 실현한다.
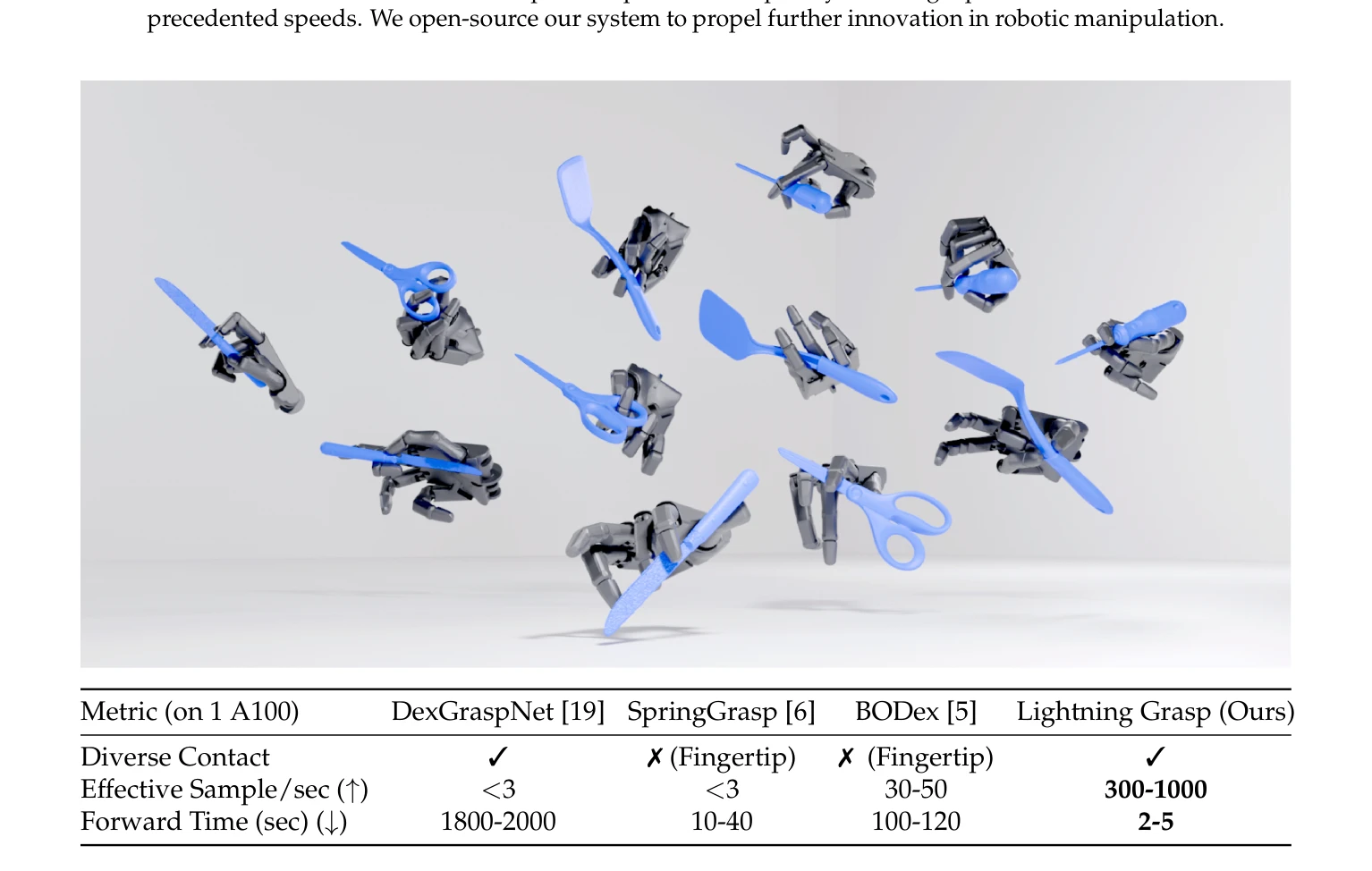
Figure 1: Lightning Grasp is a high-performance procedural (analytical) grasp synthesis algorithm.
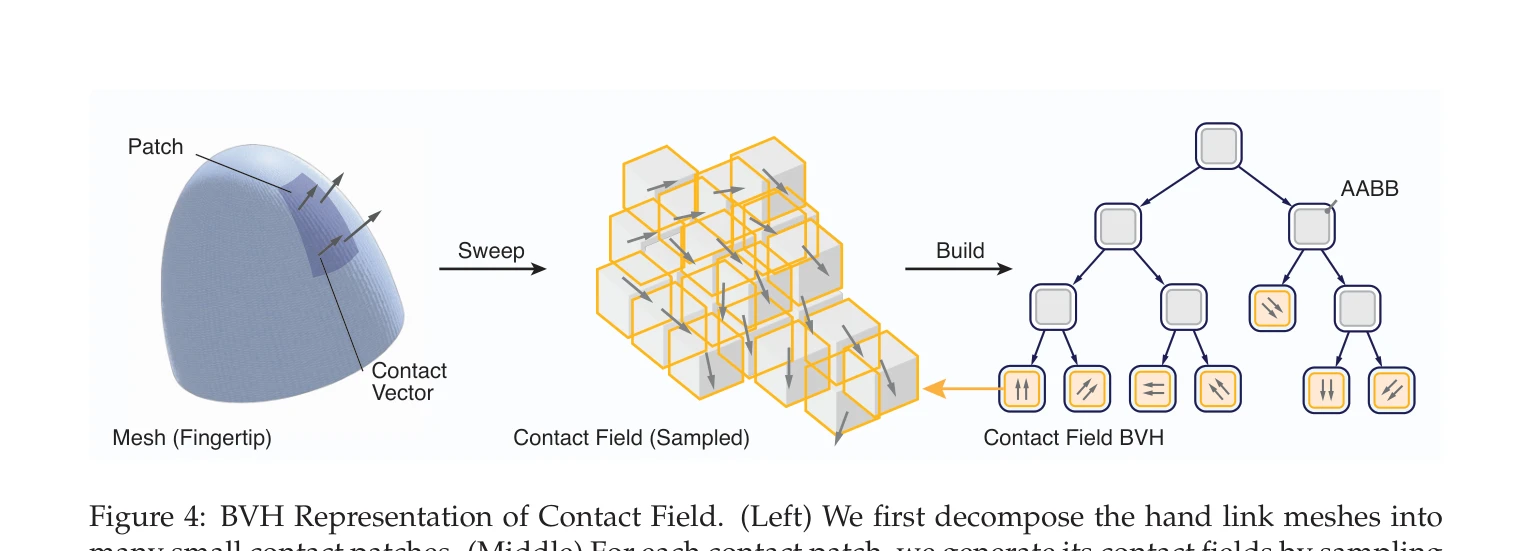
Figure 4: BVH Representation of Contact Field. (Left) We first decompose the hand link meshes into
총평: Lightning Grasp는 Contact Field라는 우아한 추상화를 통해 파지 합성의 근본적 병목을 해결하고 획기적인 속도 향상을 달성한 혁신적 기여로, 절차적 파지 합성의 새로운 표준을 제시한다.