Essence
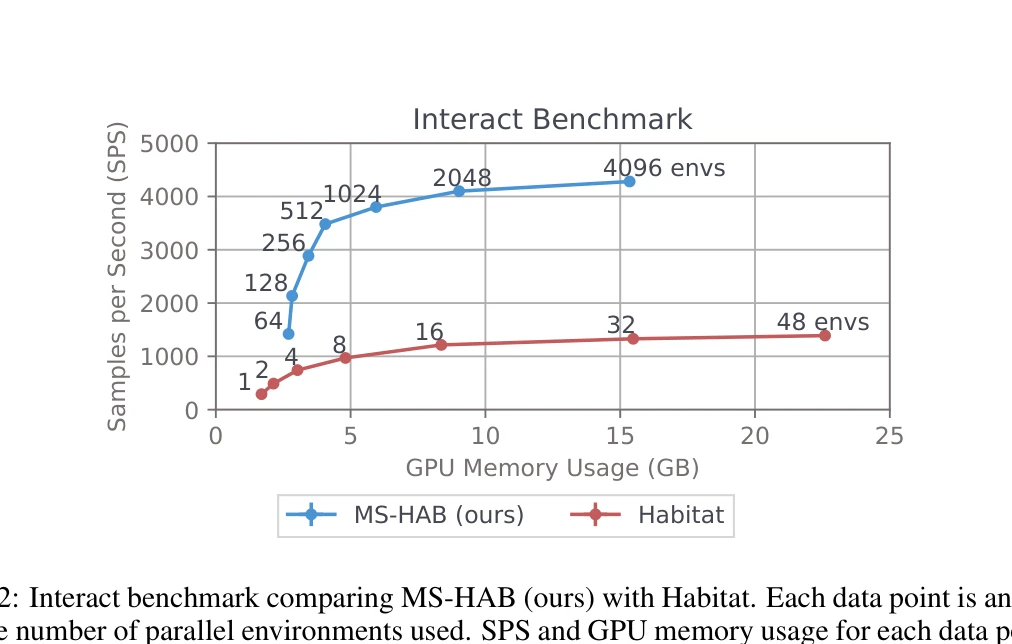
Figure 2: Interact benchmark comparing MS-HAB (ours) with Habitat. Each data point is annotated
MS-HAB는 GPU 가속화된 Home Assistant Benchmark의 구현으로, 현실적인 저수준 조작과 빠른 시뮬레이션 속도(4300 SPS)를 지원하며 대규모 데이터셋 생성을 위한 자동화된 궤적 필터링 시스템을 제공한다.
저자: Arth Shukla, Stone Tao, Hao Su | 날짜: 2024-12-09 | URL: https://arxiv.org/abs/2412.13211 📄 PDF
Figure 2: Interact benchmark comparing MS-HAB (ours) with Habitat. Each data point is annotated
MS-HAB는 GPU 가속화된 Home Assistant Benchmark의 구현으로, 현실적인 저수준 조작과 빠른 시뮬레이션 속도(4300 SPS)를 지원하며 대규모 데이터셋 생성을 위한 자동화된 궤적 필터링 시스템을 제공한다.
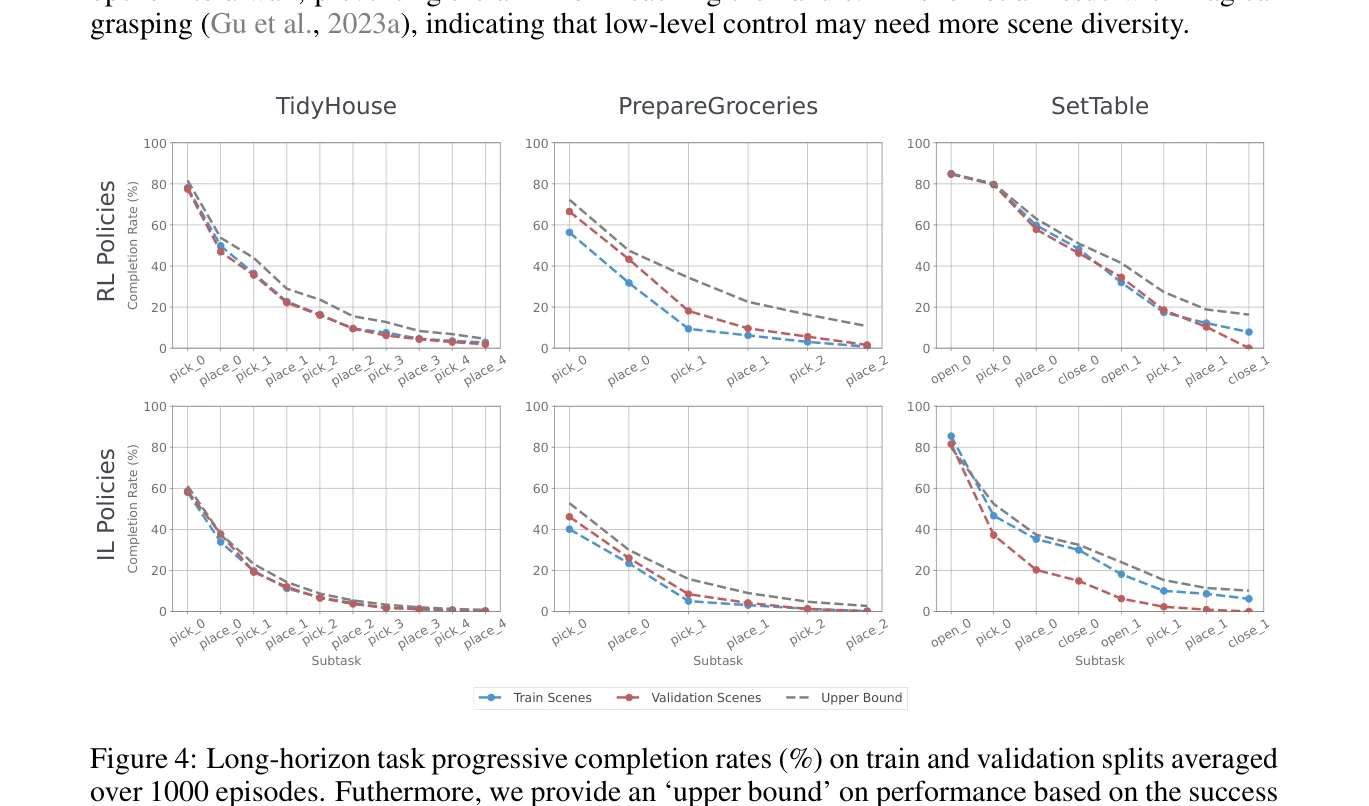
Fig. 4 shows the RL and IL policies’ progressive completion rate. We provide an optimistic upper
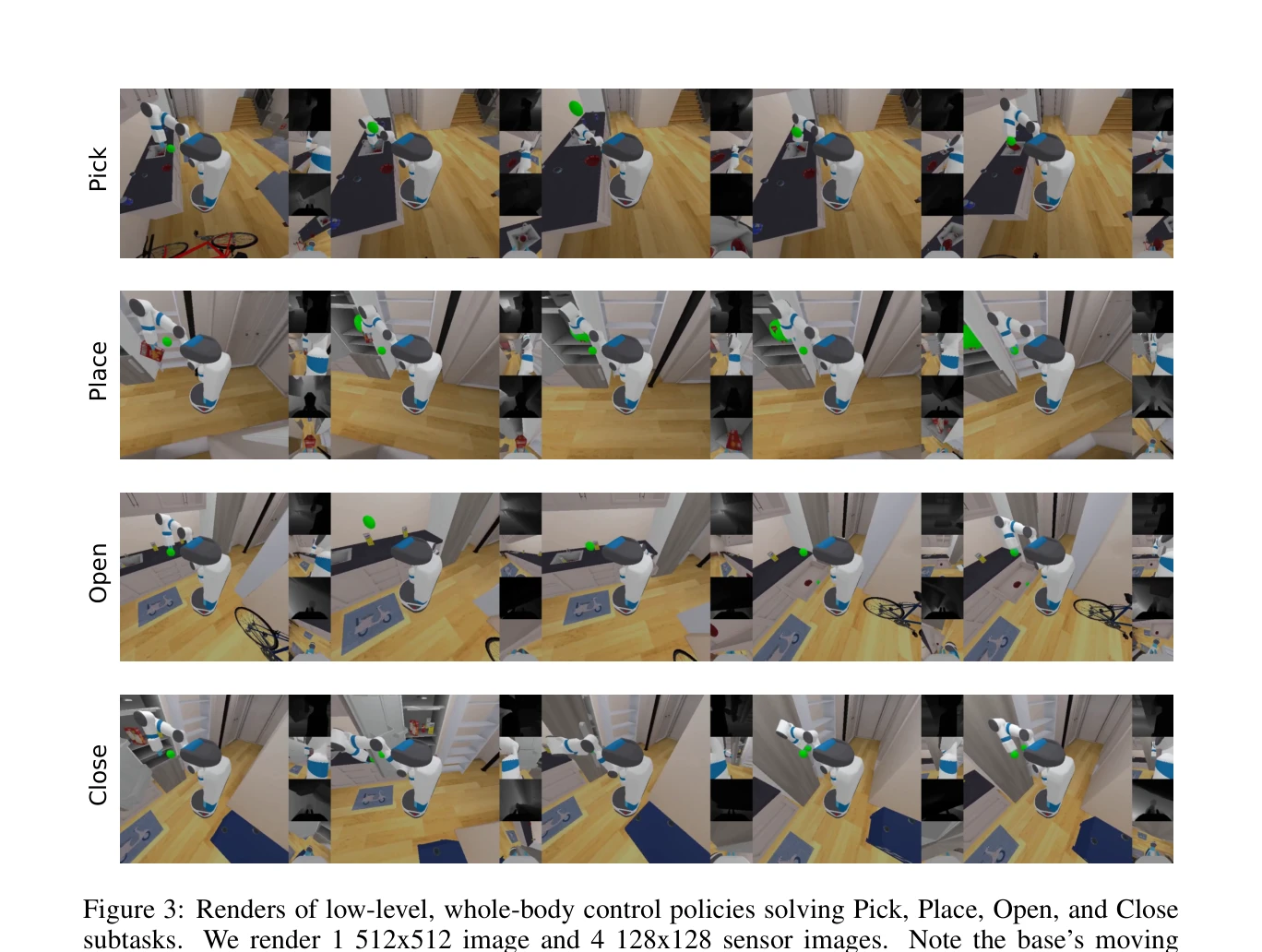
Figure 3: Renders of low-level, whole-body control policies solving Pick, Place, Open, and Close
총평: MS-HAB는 현실적인 저수준 조작 제어, 고속 GPU 시뮬레이션, 그리고 자동화된 데이터 생성을 통합하여 가정용 로봇 조작 연구의 중요한 벤치마크를 제공하며, 광범위한 기반선과 투명한 평가 지표는 후속 연구에 큰 가치를 제공한다.