Achievement
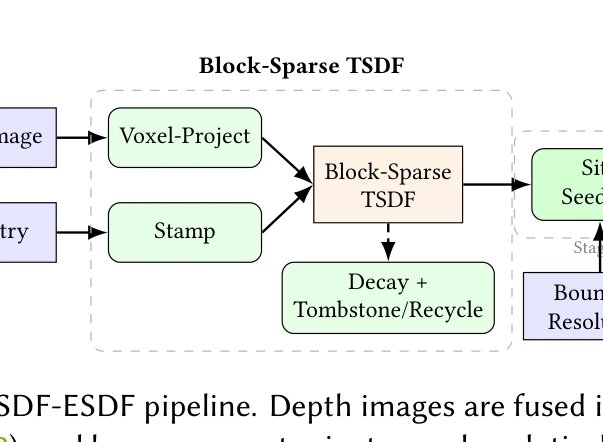
Figure 3: TSDF-ESDF pipeline. Depth images are fused into a block-sparse TSDF via voxel-centric projec-
- B-spline 궤적 최적화: 제어점 최적화를 통해 부드러움과 토크 제약을 자동으로 보장하여 동역학 인식적 계획과 비정적 경계 조건의 반응형 제어를 통합
- GPU 네이티브 인식 파이프라인: 블록-희소 TSDF를 밀집 ESDF로 변환하여 작업공간 전역에 대한 O(1) 거리 쿼리 제공, nvblox 대비 10배 빠르고 8배 메모리 절감, 99% 충돌 감지율
- 고자유도 확장성: 위상 인식 운동학, 미분 가능 역동역학, 맵-리듀스 자충돌로 GPU 구현이 실패하던 48-DoF 인형로봇에서 99.6% 충돌 회피 역운동학 달성, 40배 가속화
- 실험 성과: 3kg 페이로드에서 99.7% 성공률(기존 72-77%), 48-DoF 인형로봇 역운동학 99.6%, PyRoki 대비 89.5% vs 61% 재타겟팅 제약 만족도, 21% 낮은 추적 오차