Essence
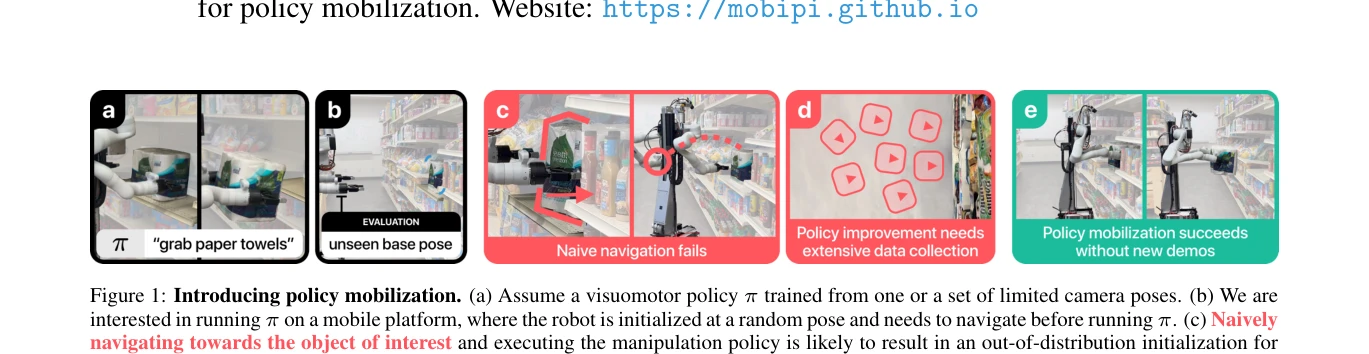
Figure 1: Introducing policy mobilization. (a) Assume a visuomotor policy π trained from one or a set of limited camera
모바일 로봇에서 제한된 관점으로 학습된 조작 정책을 배포할 때 발생하는 분포 외 문제를 해결하기 위해, 정책과 호환되는 로봇 베이스 포즈를 찾는 '정책 모빌라이제이션' 문제를 제시하고 3D Gaussian Splatting과 샘플링 기반 최적화를 통해 해결한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 모바일 조작 로봇에서 기존 정책의 재사용성을 크게 향상시키는 정책 모빌라이제이션이라는 새로운 문제를 정의하고, 3D Gaussian Splatting과 최적화 기법을 활용한 실용적 해법을 제시했다. 시뮬레이션과 실제 환경에서의 광범위한 검증을 통해 방법론의 유효성을 입증하였으며, 제시된 프레임워크는 향후 모바일 조작 연구의 중요한 기준이 될 것으로 기대된다.

