Essence
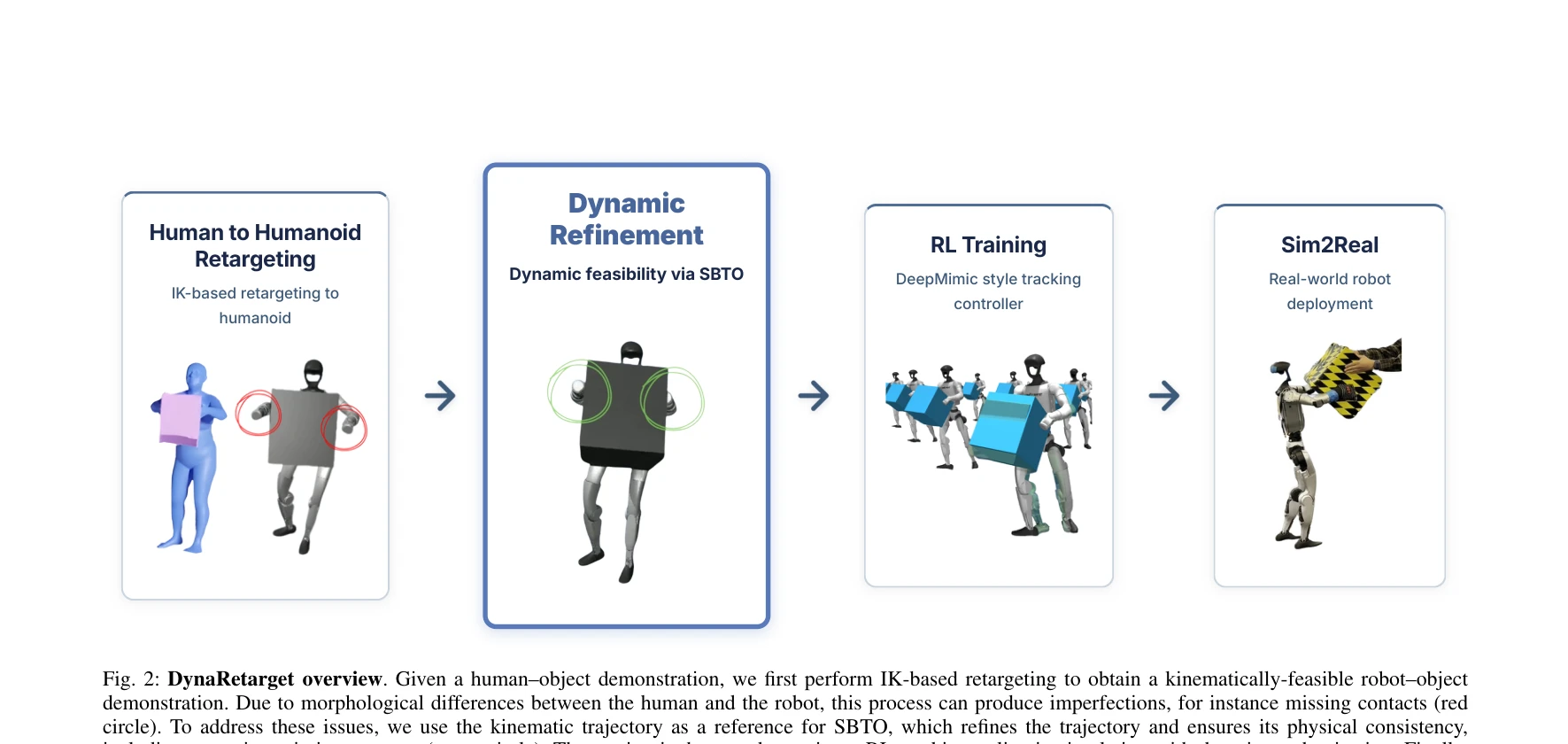
Fig. 2: DynaRetarget overview. Given a human–object demonstration, we first perform IK-based retargeting to obtain a kin
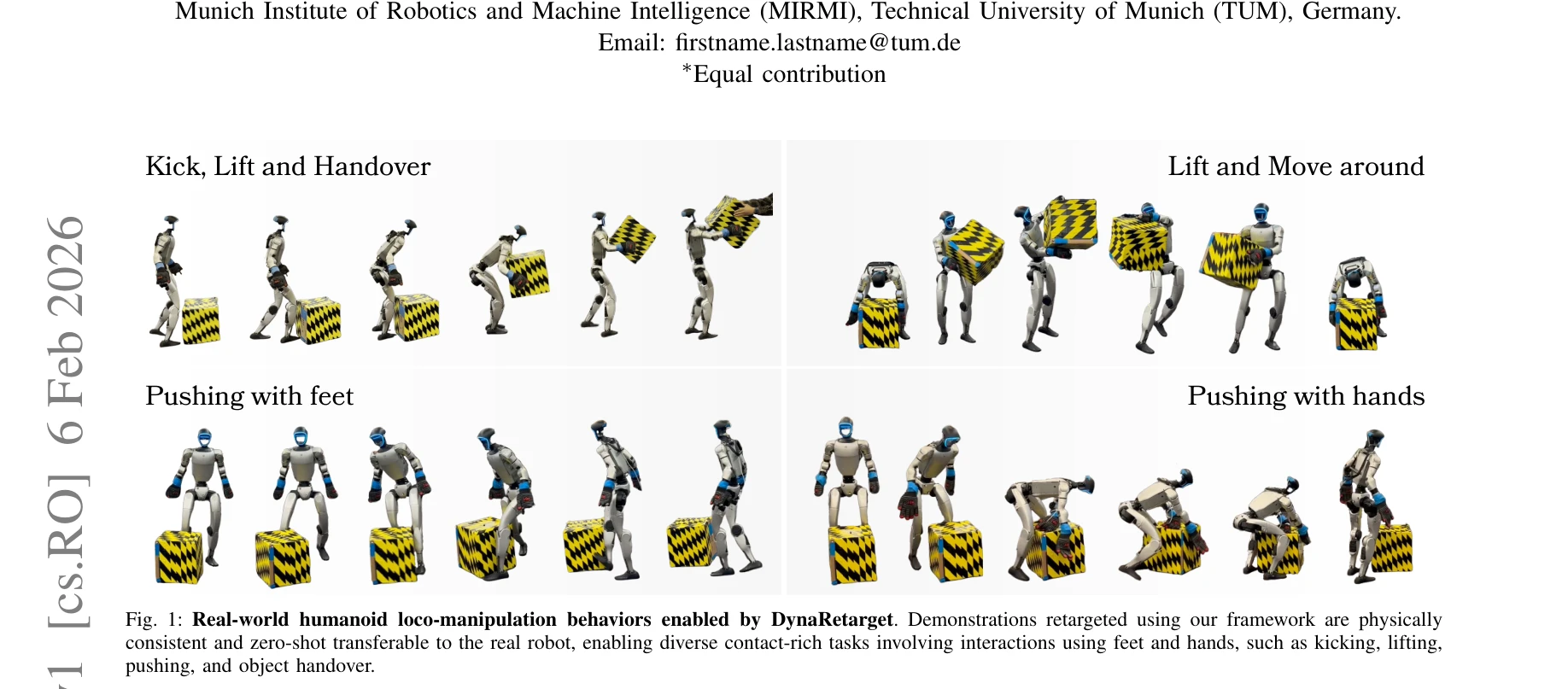
DynaRetarget은 Sampling-Based Trajectory Optimization (SBTO)을 통해 운동학적으로 부정확한 인간 동작을 휴머노이드 로봇이 동적으로 실행 가능한 loco-manipulation 행동으로 변환하는 완전한 파이프라인을 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: DynaRetarget은 sampling-based trajectory optimization의 incremental horizon 확장 개념을 통해 humanoid loco-manipulation retargeting의 동적 실행 가능성 문제를 효과적으로 해결하며, 광범위한 실험과 실제 로봇 배포를 통해 그 효과를 입증한 의미 있는 기여이다.