Essence
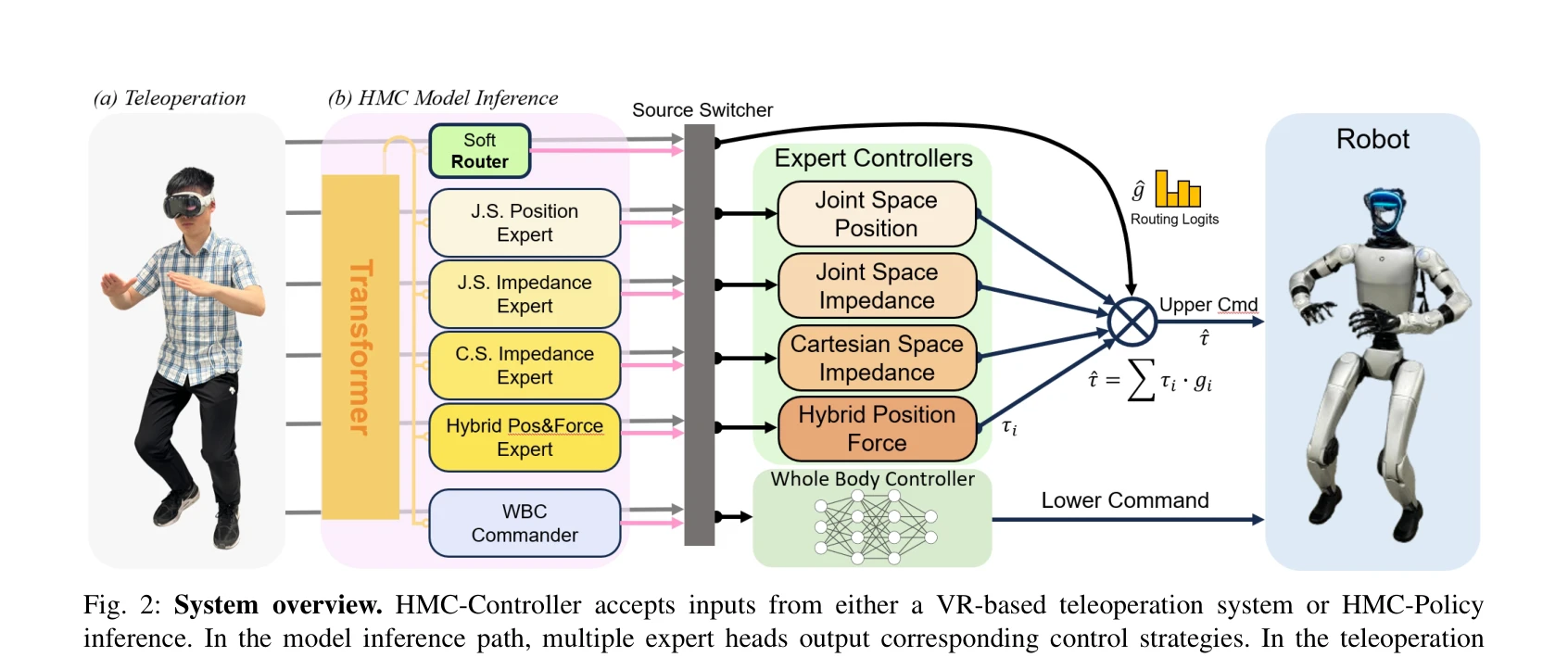
Fig. 2: System overview. HMC-Controller accepts inputs from either a VR-based teleoperation system or HMC-Policy
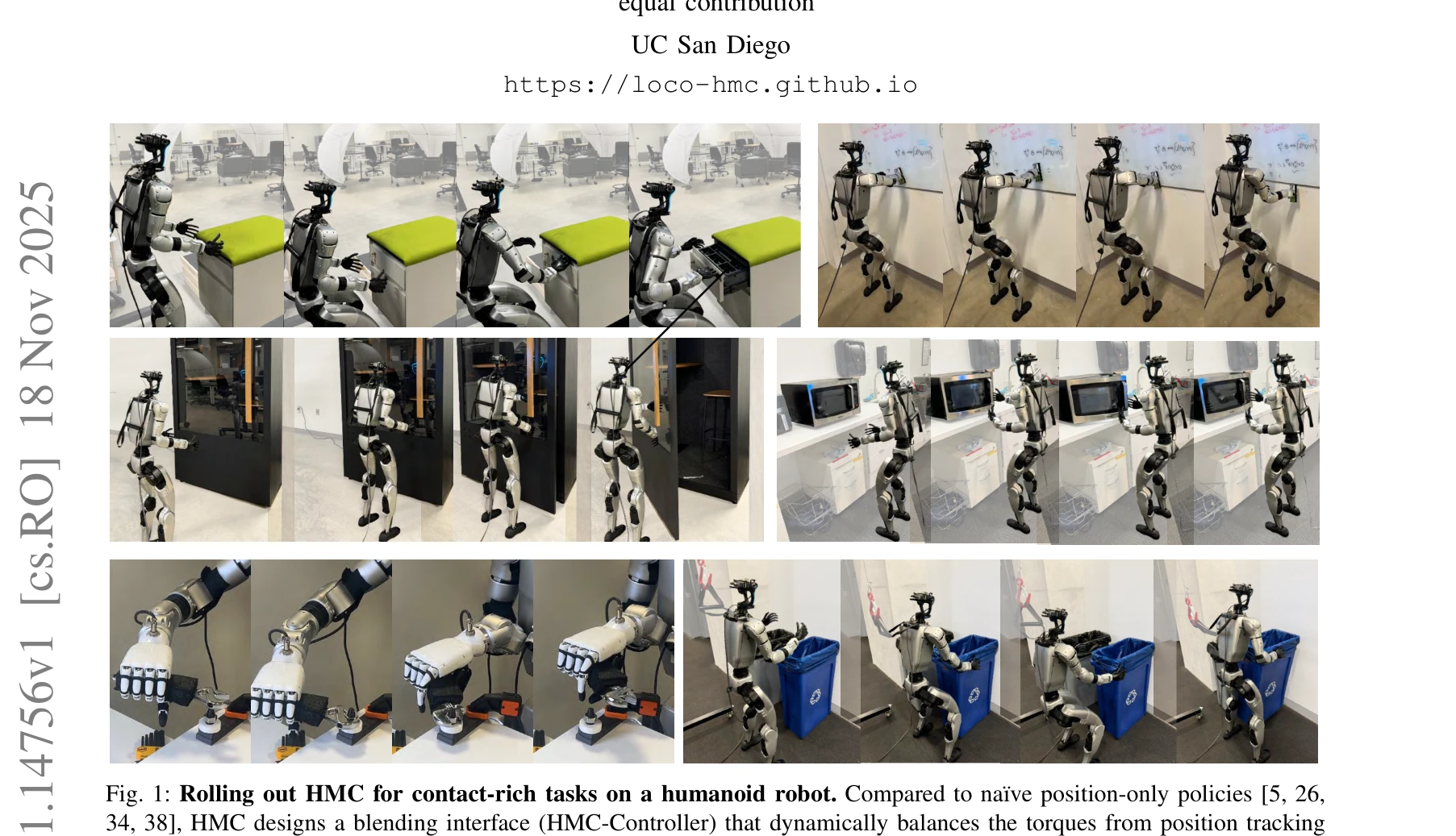
로봇의 접촉이 많은 조작 작업을 위해 위치, 임피던스, 하이브리드 힘-위치 제어를 적응적으로 혼합하는 HMC(Heterogeneous Meta-Control) 프레임워크를 제안하며, mixture-of-experts 라우팅을 통해 대규모 위치 데이터와 미세한 힘 인식 시연으로부터 학습한다.