Essence
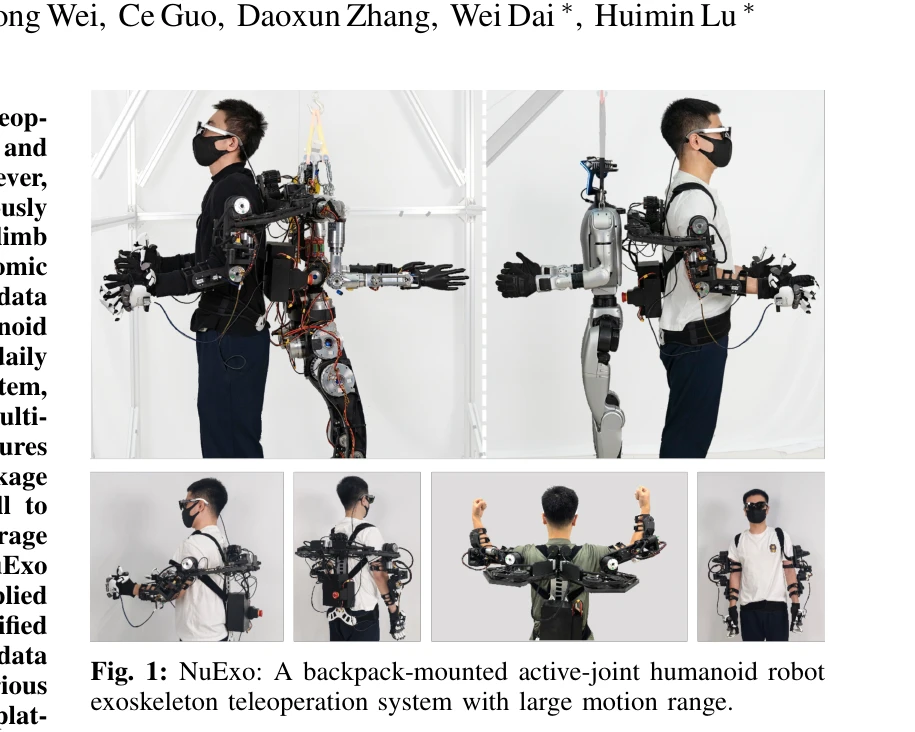
Fig. 1: NuExo: A backpack-mounted active-joint humanoid robot
상지의 전체 운동 범위를 커버하면서 야외 환경에서 사용 가능한 경량 웨어러블 외골격계(exoskeleton) NuExo를 개발하여 인간형 로봇의 원격조종과 모션 데이터 수집을 동시에 수행한다.
저자: Rui Zhong, Chuang Cheng, Junpeng Xu, Yantong Wei, Ce Guo, Daoxun Zhang, Wei Dai, Huimin Lu | 날짜: 2025-03-13 | URL: https://arxiv.org/abs/2503.10554 📄 PDF
Fig. 1: NuExo: A backpack-mounted active-joint humanoid robot
상지의 전체 운동 범위를 커버하면서 야외 환경에서 사용 가능한 경량 웨어러블 외골격계(exoskeleton) NuExo를 개발하여 인간형 로봇의 원격조종과 모션 데이터 수집을 동시에 수행한다.
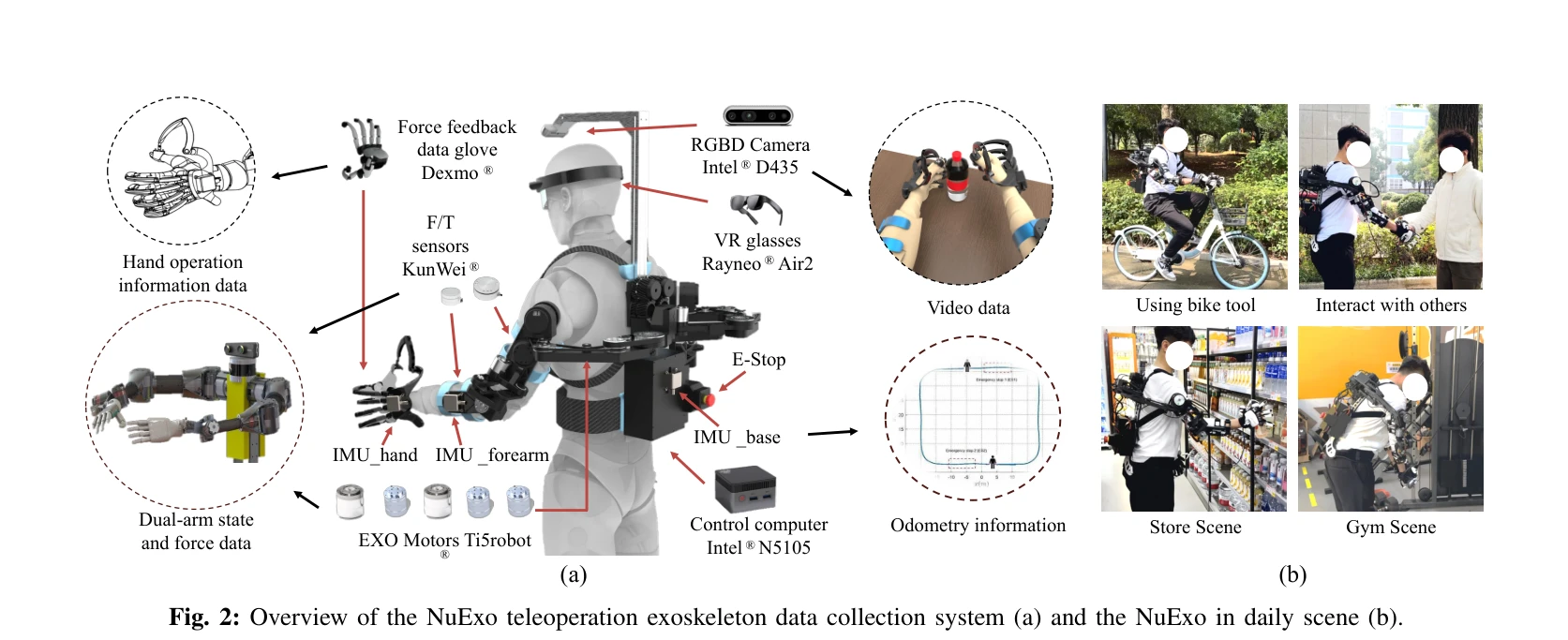
Fig. 2: Overview of the NuExo teleoperation exoskeleton data collection system (a) and the NuExo in daily scene (b).
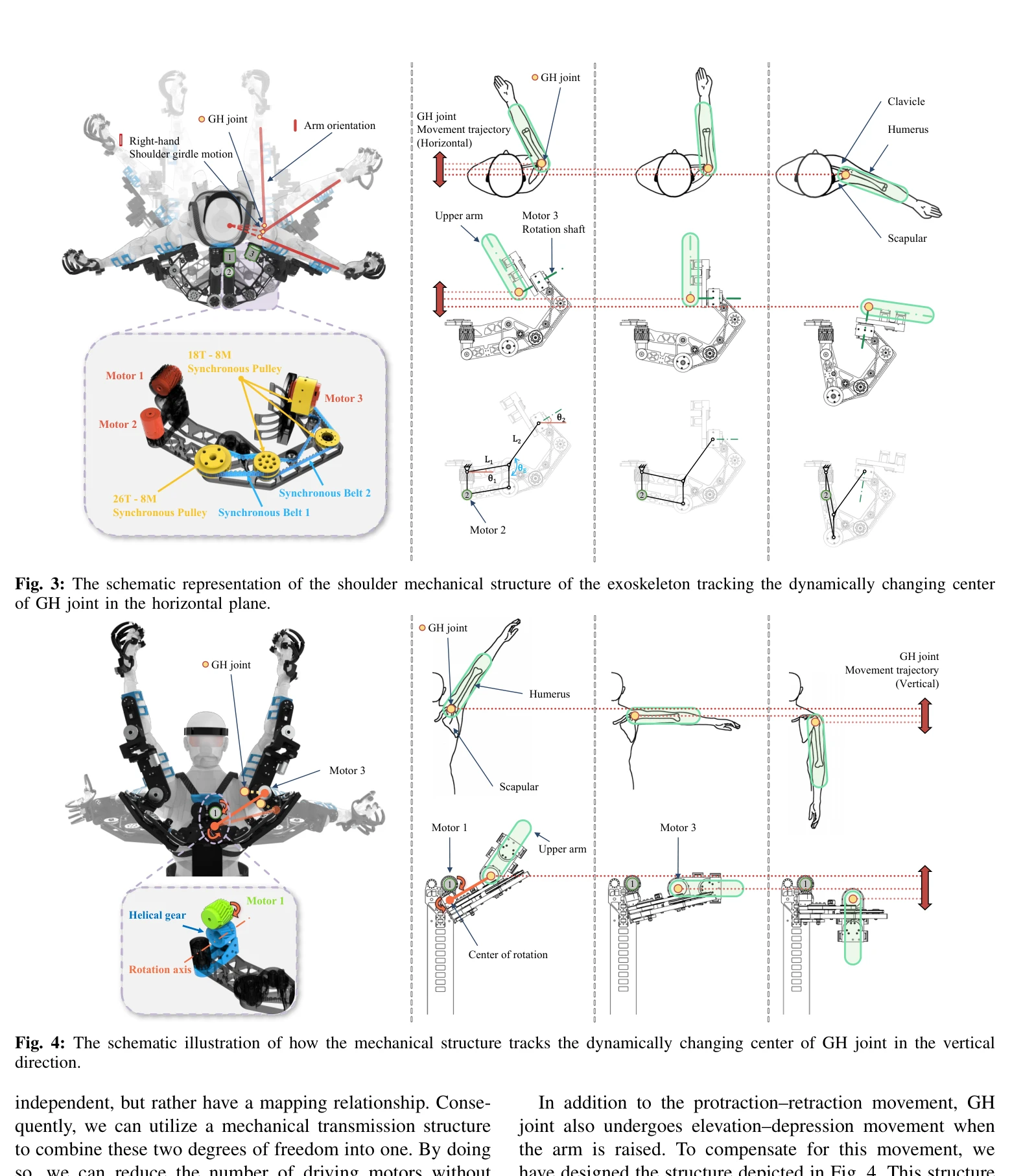
Fig. 3: The schematic representation of the shoulder mechanical structure of the exoskeleton tracking the dynamically ch
총평: NuExo는 해부학적으로 영감받은 외골격계 설계와 경량화, multi-modal sensing의 통합을 통해 teleoperation과 로봇 모션 데이터 수집의 네 가지 핵심 목표를 동시에 달성한 혁신적 시스템이다. 야외 환경에서의 실용성과 다양한 로봇 플랫폼 호환성은 인간형 로봇의 imitation learning 분야에 중대한 기여를 한다.