저자: Rui Zhong, Yizhe Sun, Junjie Wen, Jinming Li, Chuang Cheng, Wei Dai, Zhiwen Zeng, Huimin Lu, Yichen Zhu, Yi Xu | 날짜: 2025-10-03 | DOI: 10.48550/arXiv.2510.03022 📄 PDF
Essence

Figure 1. HumanoidExo, a wearable exoskeleton system that transfers human motion to whole-body humanoid data. HumanoidEx
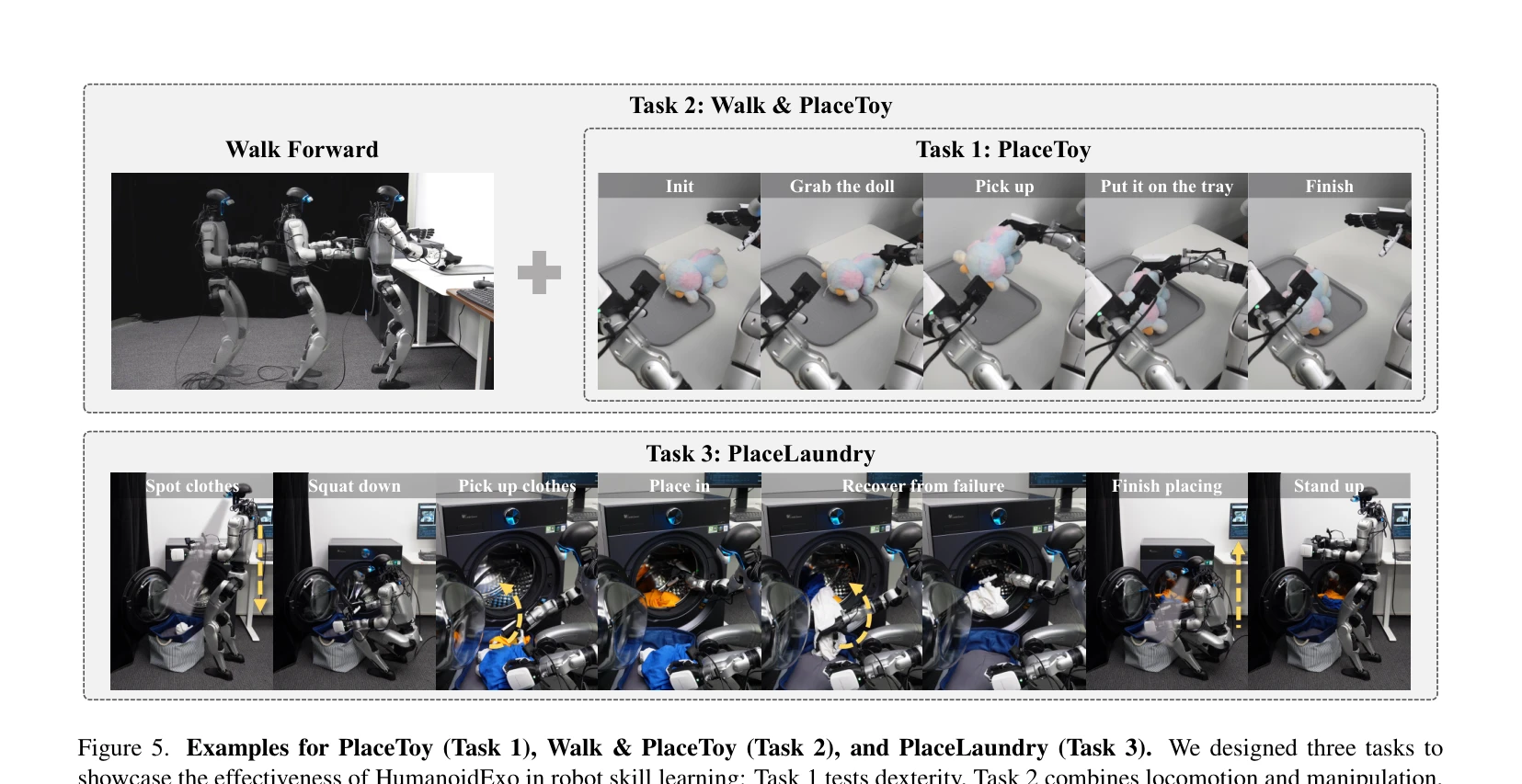
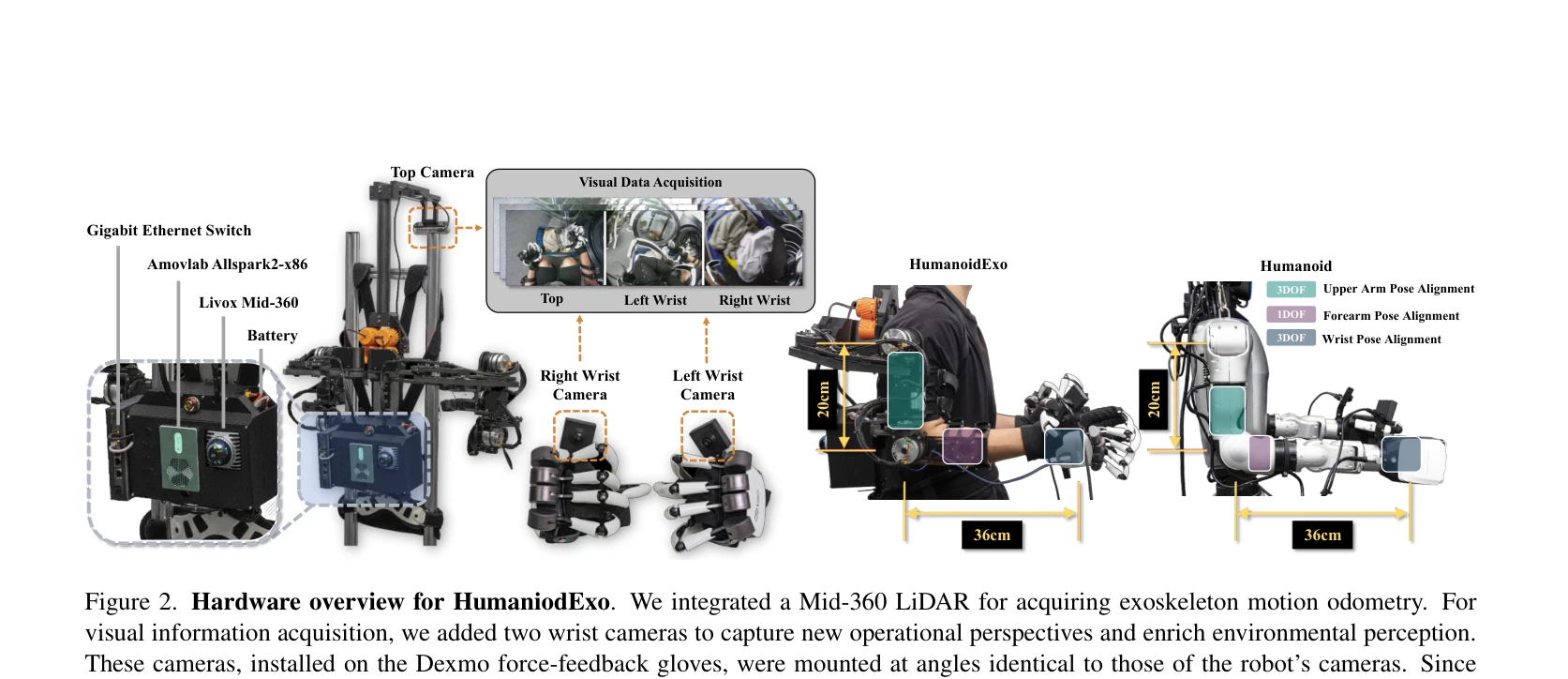
웨어러블 외골격(exoskeleton)을 통해 인간의 전신 동작을 휴머노이드 로봇 데이터로 변환하는 HumanoidExo 시스템을 제안하여, 휴머노이드 정책 학습을 위한 대규모 다양한 데이터셋 수집의 병목을 해결한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: HumanoidExo는 웨어러블 외골격을 통한 전신 휴머노이드 데이터 수집의 첫 성공적 사례로, 기존 방법의 상지 집중 문제를 극복하고 embodiment gap을 최소화한 혁신적 접근이다. 실험 결과가 제한적이고 기술적 깊이가 다소 부족하지만, 휴머노이드 정책 학습의 데이터 병목 문제 해결이라는 실질적 기여와 높은 실용성으로 인해 로보틱스 분야에 의미 있는 진전을 제시한다.