Essence
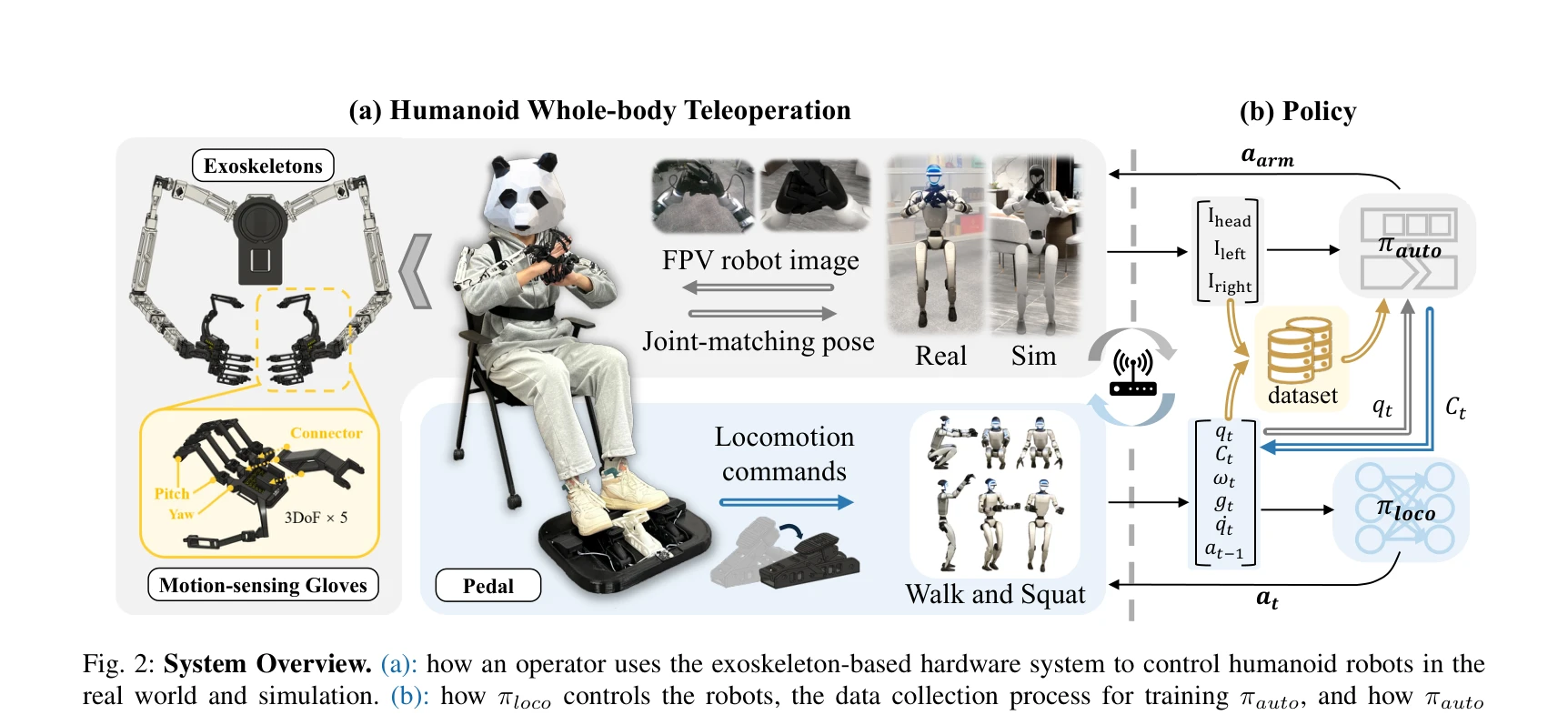
Fig. 2: System Overview. (a): how an operator uses the exoskeleton-based hardware system to control humanoid robots in t
HOMIE는 강화학습 기반 신체 제어, 동형 외골격 팔, 모션센싱 장갑을 통합한 반자율 원격조종 시스템으로, 단일 작업자가 휴머노이드 로봇의 전신 보행-조작 작업을 정밀하게 제어할 수 있게 함
저자: Qingwei Ben, Feiyu Jia, Jia Zeng, Junting Dong, Dahua Lin, Jiangmiao Pang | 날짜: 2025-02-18 | URL: https://arxiv.org/abs/2502.13013 📄 PDF
Fig. 2: System Overview. (a): how an operator uses the exoskeleton-based hardware system to control humanoid robots in t
HOMIE는 강화학습 기반 신체 제어, 동형 외골격 팔, 모션센싱 장갑을 통합한 반자율 원격조종 시스템으로, 단일 작업자가 휴머노이드 로봇의 전신 보행-조작 작업을 정밀하게 제어할 수 있게 함
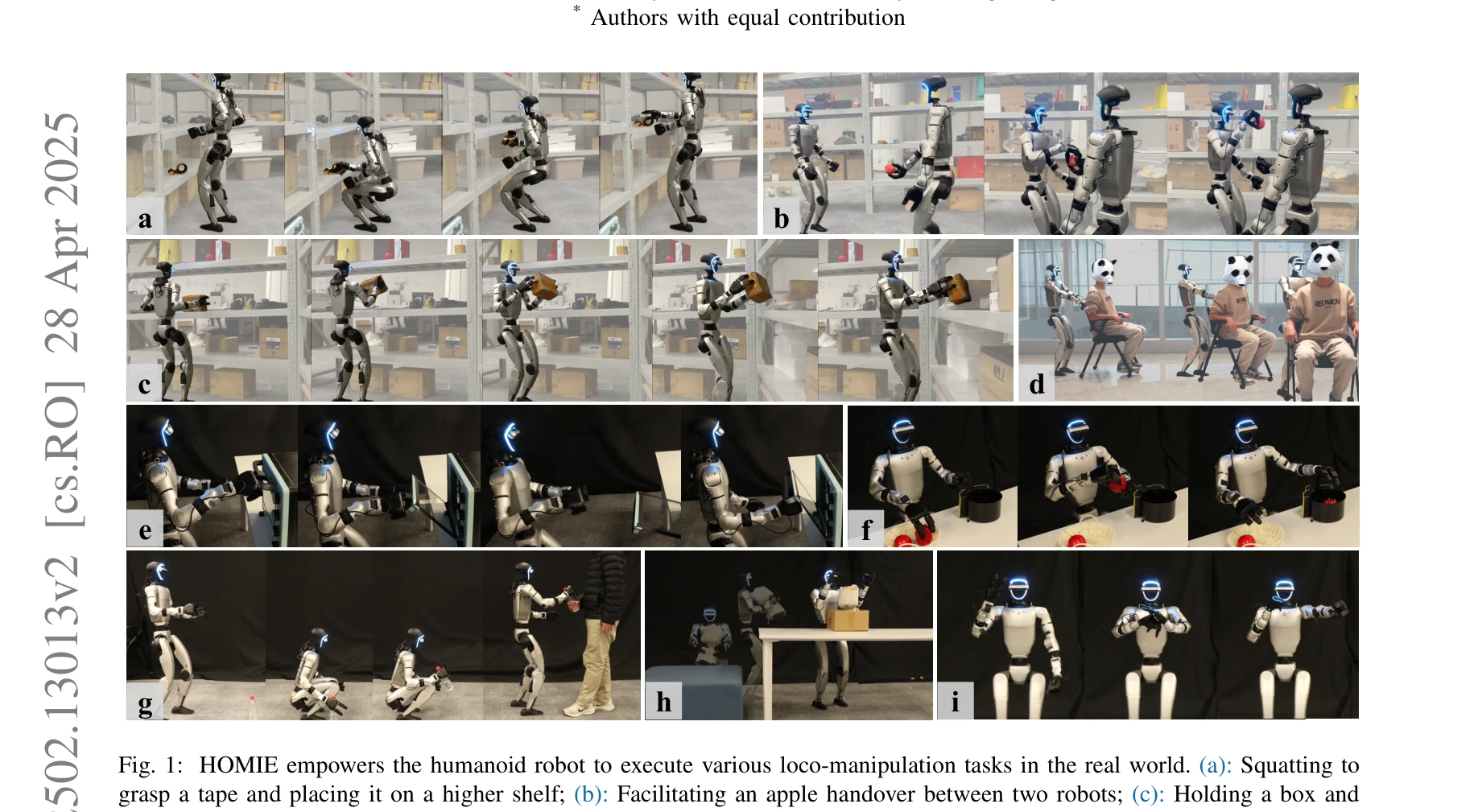
Fig. 1: HOMIE empowers the humanoid robot to execute various loco-manipulation tasks in the real world. (a): Squatting t
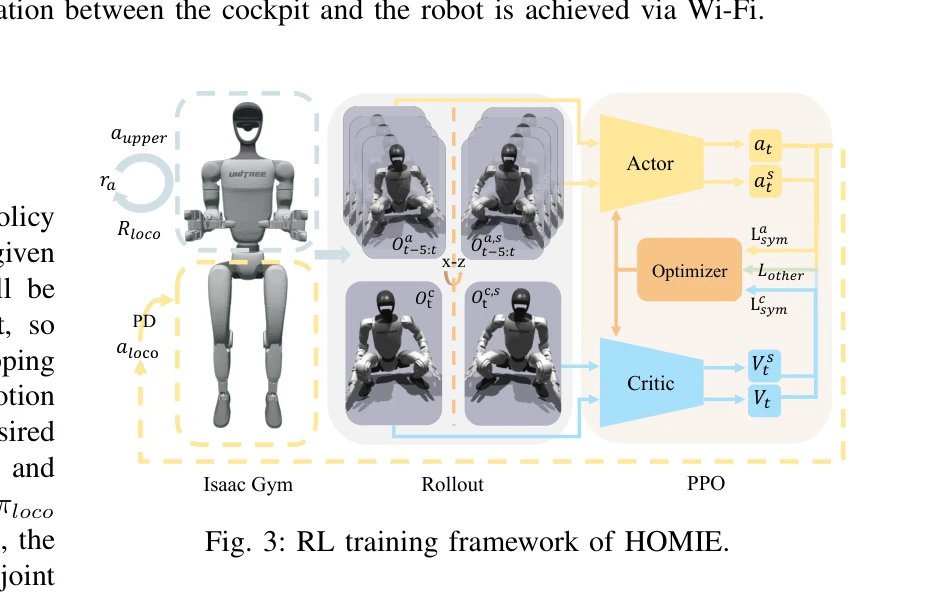
Fig. 3: RL training framework of HOMIE.
총평: HOMIE는 RL 기반 적응형 보행 제어와 저비용 동형 하드웨어를 혁신적으로 결합하여 휴머노이드 로봇의 전신 원격조종을 현실화한 획기적 시스템으로, 비용 효율성과 성능에서 기존 솔루션을 크게 초월하며 실용적 가치가 높음