Essence
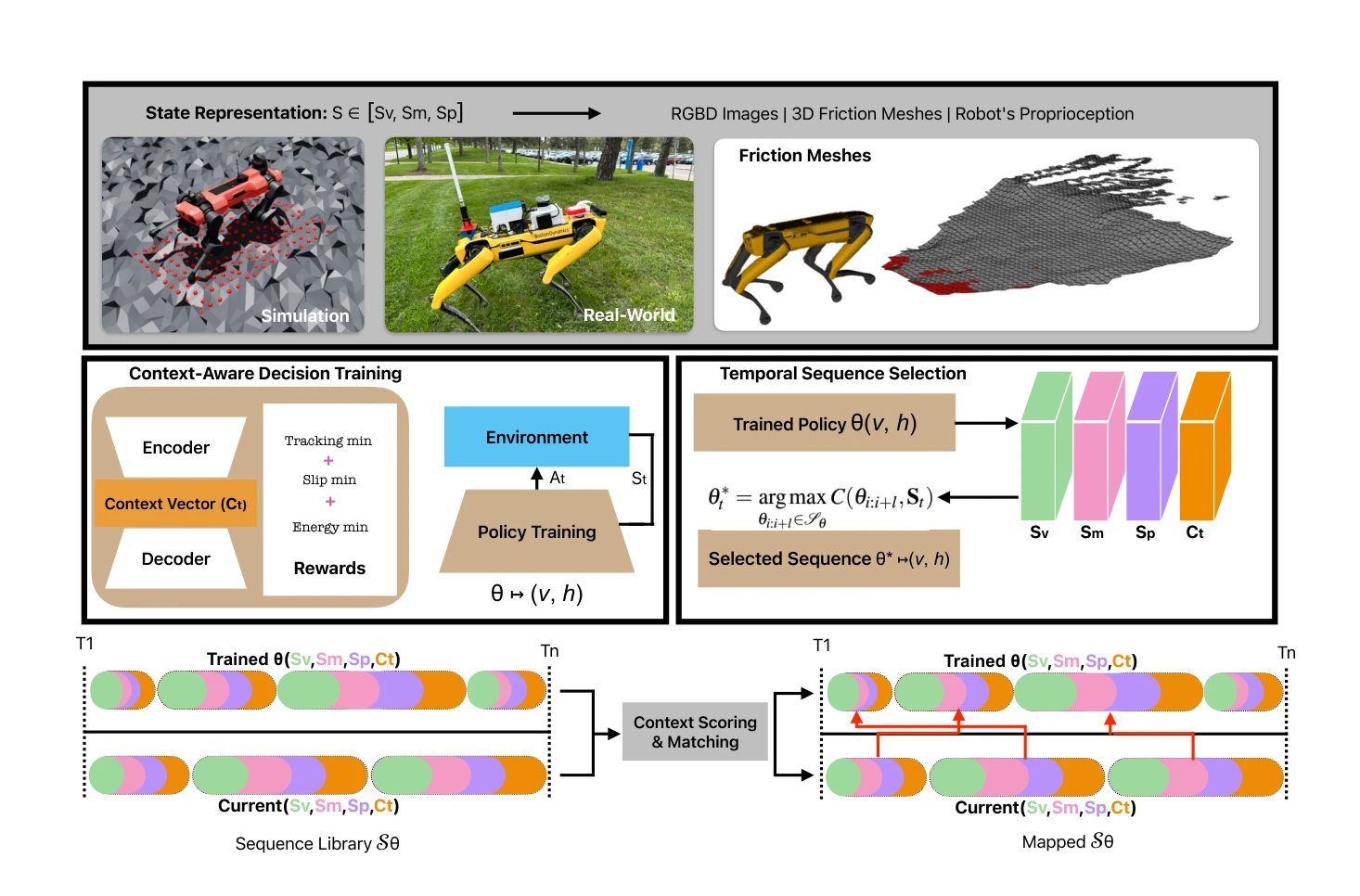
Fig. 2: Overview of the Pipeline: CART inputs a stream of RGBD images Sv, friction meshes Sm using [19], and propriocept
CART는 사족 로봇의 지형 적응을 위해 시각 정보와 고유감각(proprioception)을 통합하여 맥락을 파악하고, 시간 수열 선택을 통해 로봇의 안정성을 향상시키는 고수준 제어기이다.
저자: Kartikeya Singh, Youngjin Kim, Yash Turkar, Karthik Dantu | 날짜: 2026-04-15 | URL: https://arxiv.org/abs/2604.14344 📄 PDF
Fig. 2: Overview of the Pipeline: CART inputs a stream of RGBD images Sv, friction meshes Sm using [19], and propriocept
CART는 사족 로봇의 지형 적응을 위해 시각 정보와 고유감각(proprioception)을 통합하여 맥락을 파악하고, 시간 수열 선택을 통해 로봇의 안정성을 향상시키는 고수준 제어기이다.
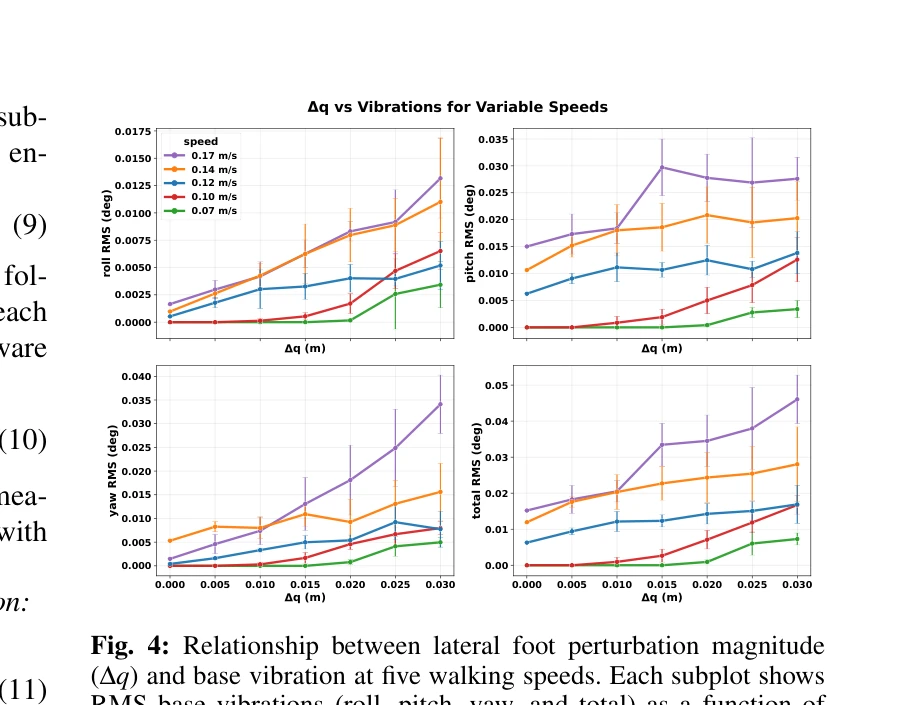
Fig. 4: Relationship between lateral foot perturbation magnitude
Fig. 2: Overview of the Pipeline: CART inputs a stream of RGBD images Sv, friction meshes Sm using [19], and propriocept
총평: CART는 시각과 고유감각의 불일치 문제를 명시적으로 인식하고 이를 해결하기 위한 창의적인 맥락 기반 제어 프레임워크를 제시하며, 시뮬레이션과 실제 환경 모두에서 안정성 개선을 입증한 의미 있는 연구이다. 다만 평가 범위 확대와 방법론의 일반화 가능성 검증이 필요하다.