저자: Haolin Song, Hongbo Zhu, Tao Yu, Yan Liu, Mingqi Yuan, Wengang Zhou, Hua Chen, Houqiang Li | 날짜: 2025-12-08 | URL: https://arxiv.org/abs/2512.07464 📄 PDF
Essence
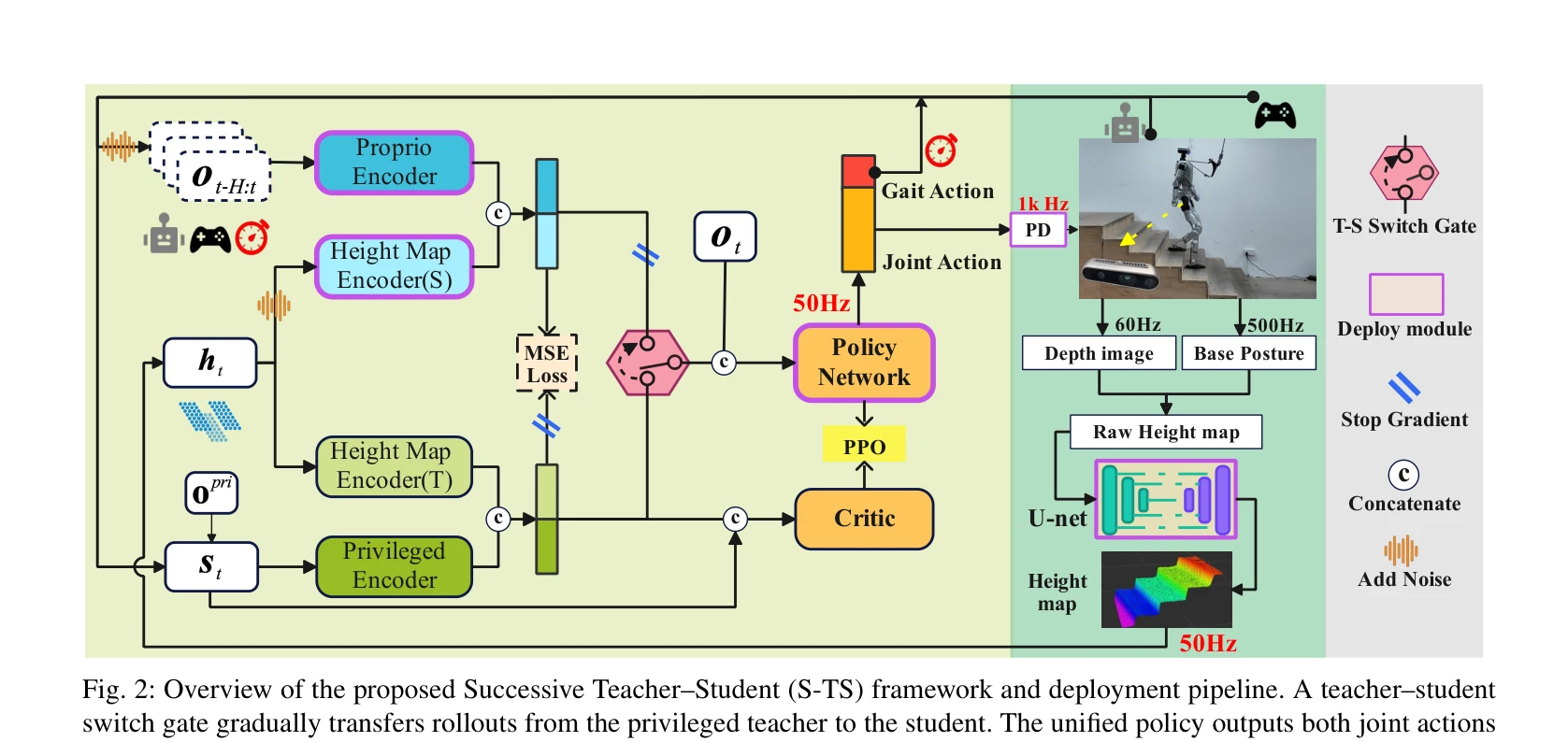
Fig. 2: Overview of the proposed Successive Teacher–Student (S-TS) framework and deployment pipeline. A teacher–student
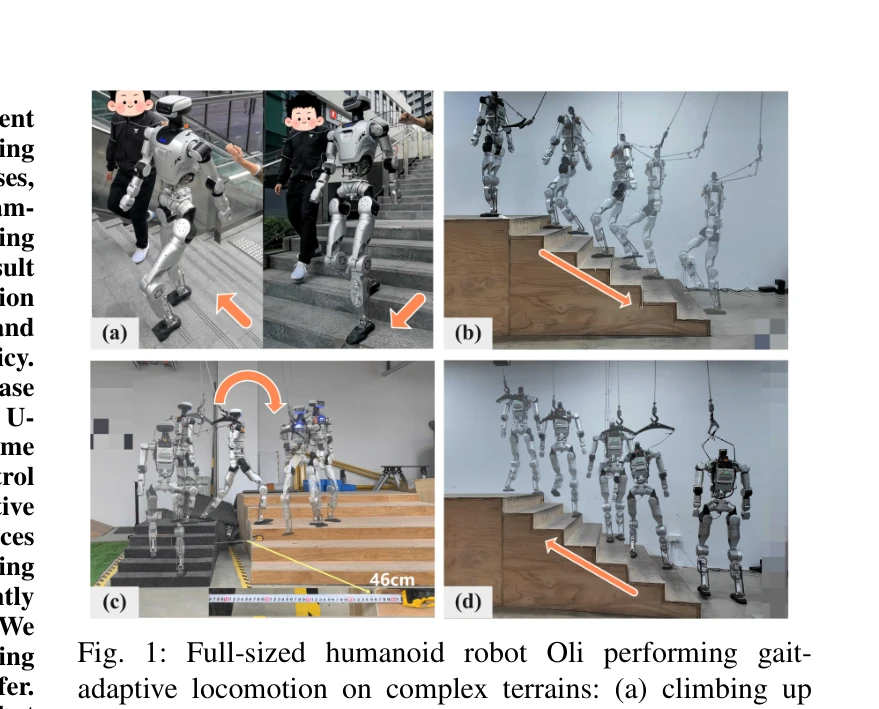
인간형 로봇의 복잡한 지형 보행을 위해 하향식 깊이 카메라로 촬영한 영상을 U-Net으로 높이맵으로 재구성하고, 이를 통합 정책에 입력하여 관절 제어와 보행 주기를 동시에 적응시키는 지각 기반 보행 프레임워크를 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 인간형 로봇의 복잡 지형 보행이라는 중요한 문제를 하향식 깊이 카메라와 U-Net 기반 높이맵 재구성, 통합 적응형 정책의 조합으로 창의롭게 해결하였으며, 실제 로봇에서 계단 오르내림과 갭 횡단을 성공적으로 시연하여 높은 실용적 가치를 보인다.