Essence
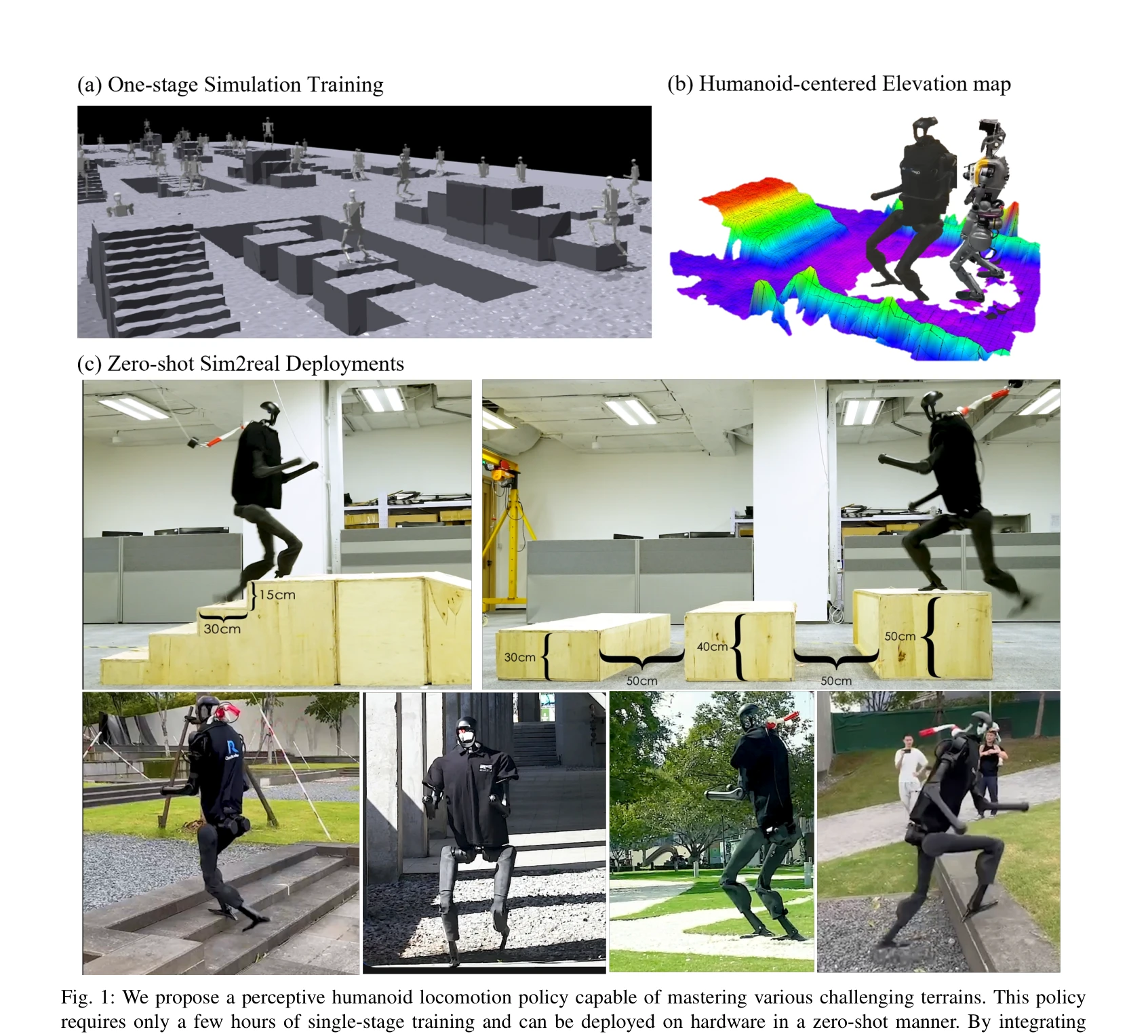
Fig. 1: We propose a perceptive humanoid locomotion policy capable of mastering various challenging terrains. This polic
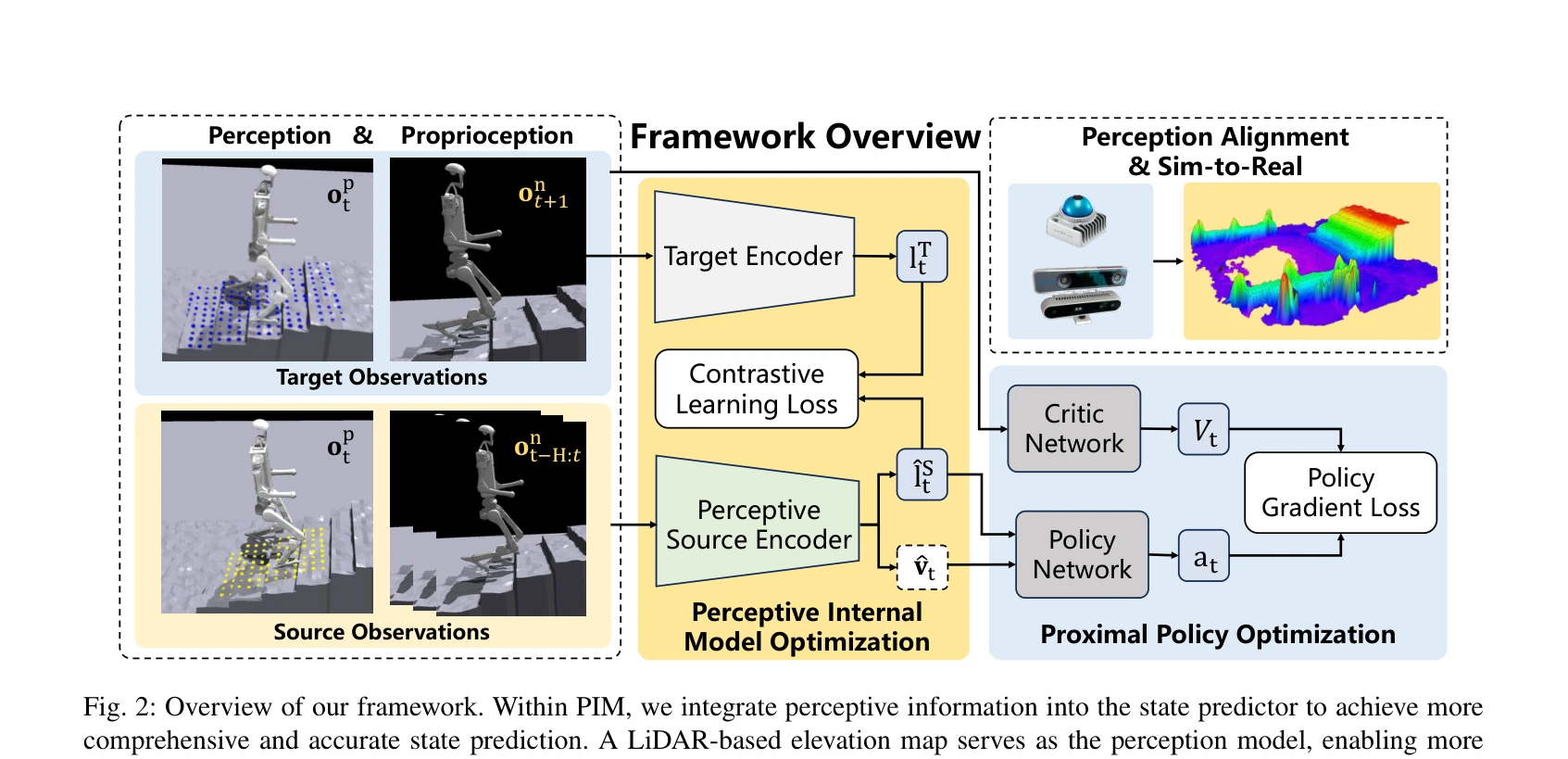
본 논문은 휴머노이드 로봇의 불안정한 형태학적 특성으로 인해 필수적인 지각 정보를 효과적으로 통합하기 위해 Perceptive Internal Model (PIM)을 제안한다. 로봇 중심의 elevation map을 기반으로 하는 이 방법은 깊이 맵이나 포인트 클라우드 직접 인코딩과 달리 시뮬레이션에서 최소한의 계산 비용으로 3시간 내에 정책 학습을 완료할 수 있다.