Essence
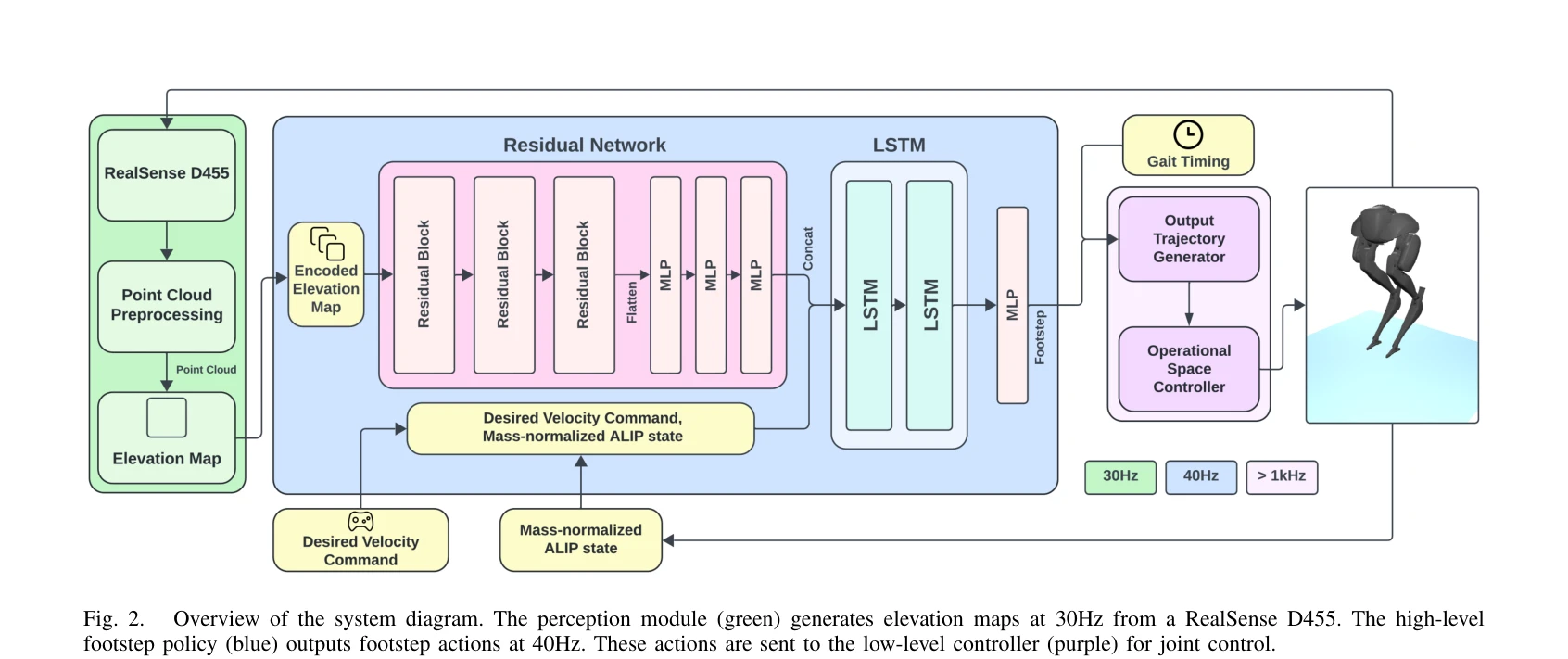
Fig. 2.
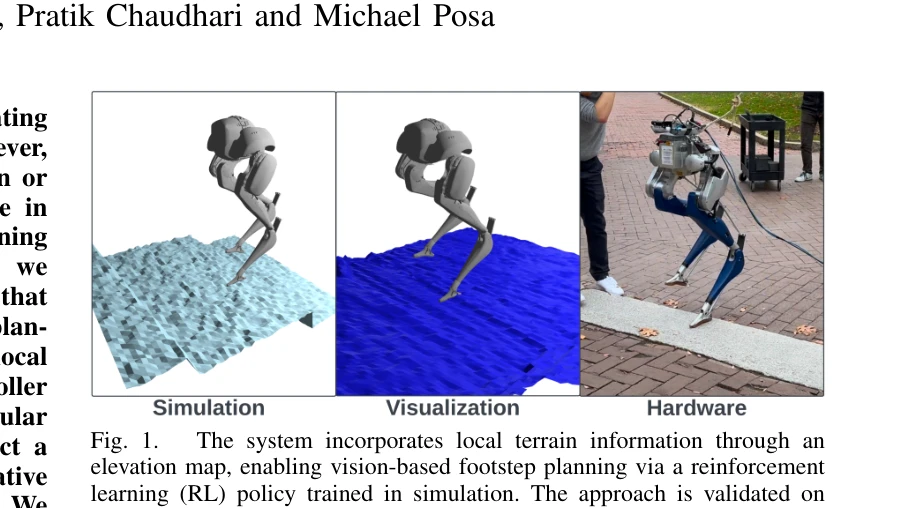
본 논문은 단일 깊이 카메라와 reinforcement learning 기반의 계층적 제어 프레임워크를 통해 쌍족 로봇이 비정형 지형에서 실시간 발걸음 계획을 수행하도록 하는 시각 기반 발걸음 계획기를 제시한다. Angular Momentum Linear Inverted Pendulum 모델을 활용하여 저차원 상태 표현을 구성하고 상위 레벨의 RL 발걸음 계획기와 하위 레벨의 Operational Space Controller를 통합한다.