Essence
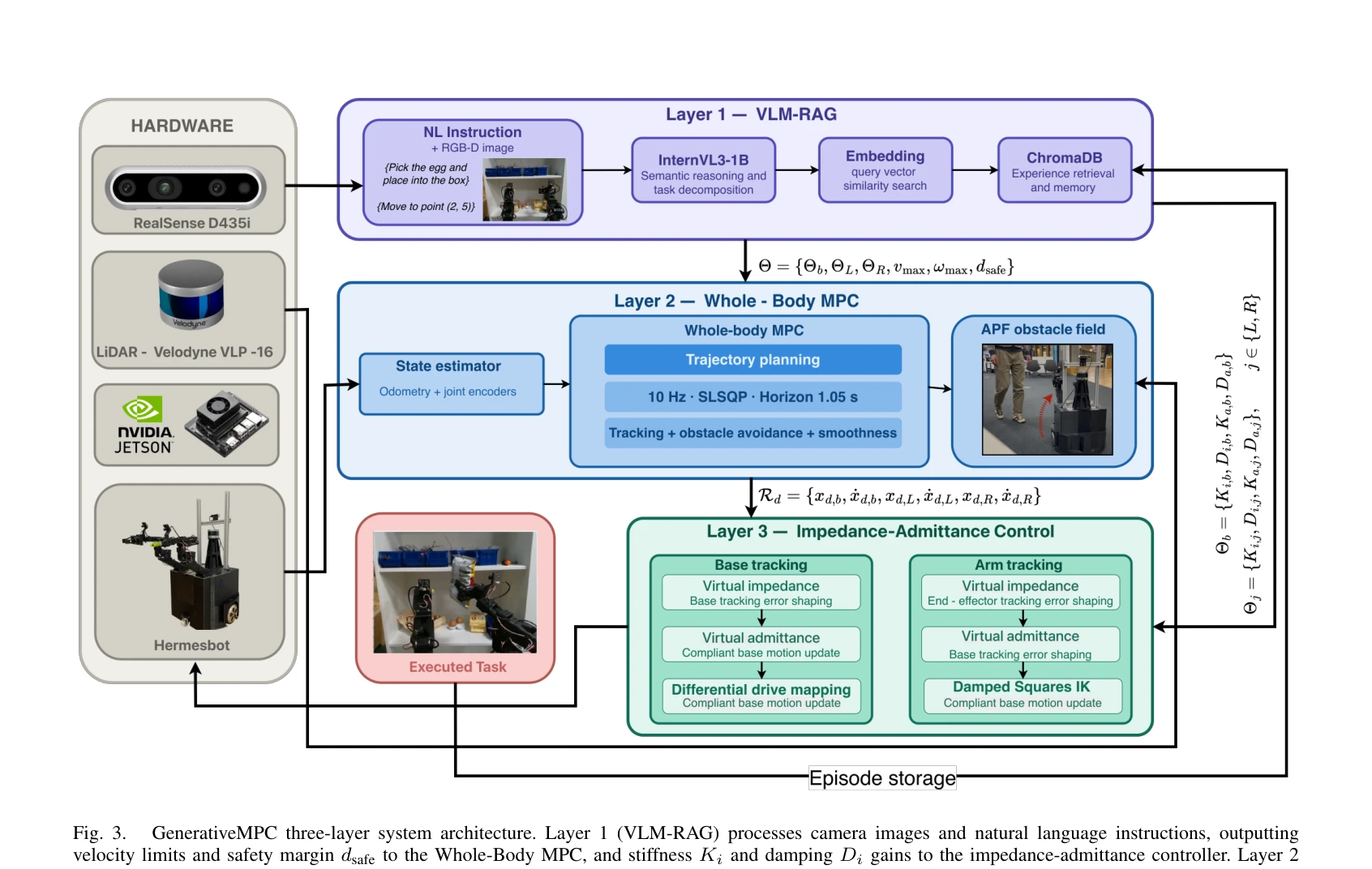
Fig. 3.
GenerativeMPC는 Vision-Language Model과 Retrieval-Augmented Generation을 활용하여 의미론적 장면 이해를 물리적 제어 파라미터로 변환하고, Whole-Body MPC와 통합 임피던스-어드미턴스 제어기를 통해 양팔 이동형 조작 로봇의 안전하고 맥락인식적인 제어를 실현한다.
저자: Marcelino Julio Fernando, Miguel Altamirano Cabrera, Jeffrin Sam, Yara Mahmoud, Konstantin Gubernatorov, Dzmitry Tsetserukou | 날짜: 2026-04-21 | URL: https://arxiv.org/abs/2604.19522 📄 PDF
Fig. 3.
GenerativeMPC는 Vision-Language Model과 Retrieval-Augmented Generation을 활용하여 의미론적 장면 이해를 물리적 제어 파라미터로 변환하고, Whole-Body MPC와 통합 임피던스-어드미턴스 제어기를 통해 양팔 이동형 조작 로봇의 안전하고 맥락인식적인 제어를 실현한다.
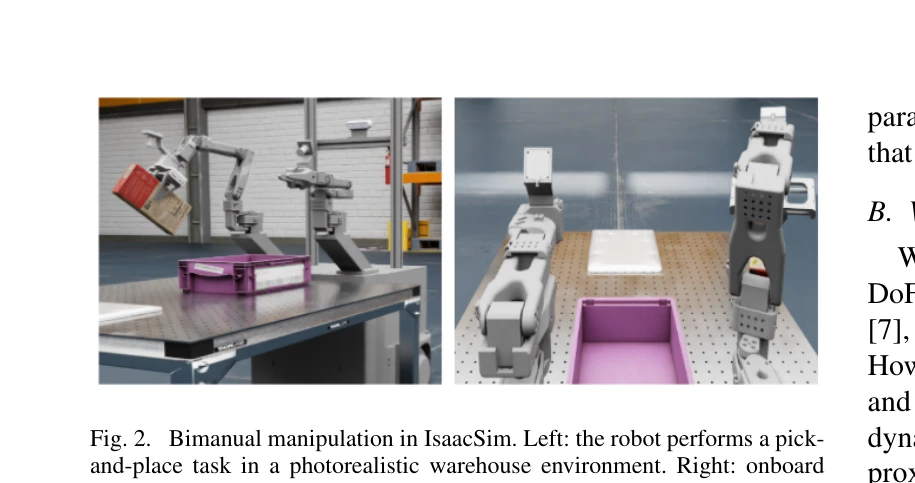
Fig. 2. Bimanual manipulation in IsaacSim. Left: the robot performs a pick-
Fig. 3.
총평: GenerativeMPC는 의미론적 이해와 물리적 안전성을 체계적으로 통합하는 창의적 접근으로, VLM-RAG 기반 파라미터 생성과 경험 메모리의 신규 활용을 통해 양팔 이동형 조작 로봇의 인간중심 자율성을 크게 향상시킨다. 광범위한 시뮬레이션 및 실제 검증으로 신뢰성을 입증했으나, 실제 플랫폼 실험 확대와 분포 외 robustness 분석이 추가 필요하다.