Essence
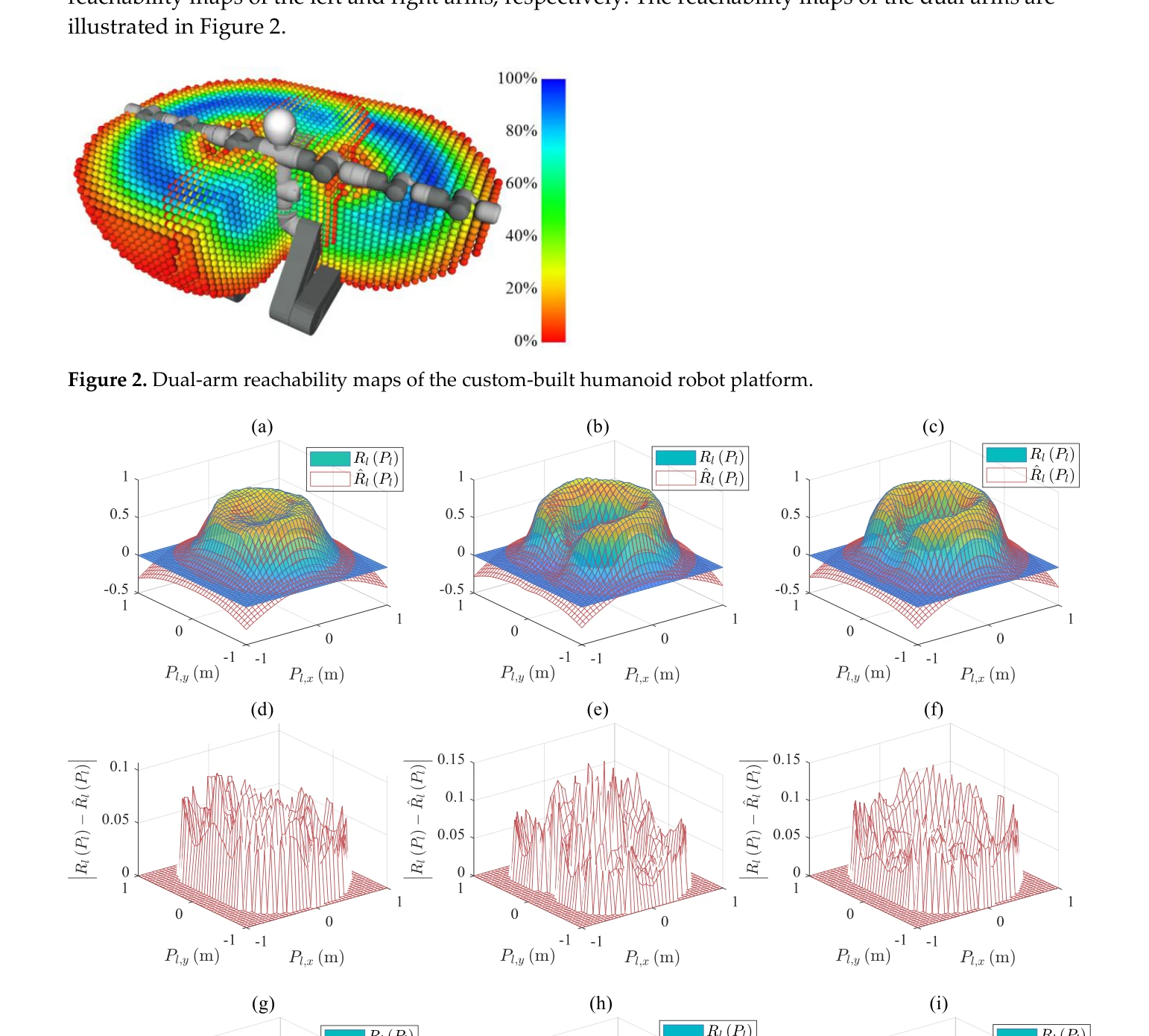
Figure 2. Dual-arm reachability maps of the custom-built humanoid robot platform.
본 논문은 인간형 로봇의 비파지 운송 작업을 위한 텔레조작 시스템에서 다층적 안전 제약 조건을 동시에 만족하는 Multiple-Constraint Safety-Critical Control Framework (MC-SCCF)를 제안한다. 계층적 3계층 아키텍처를 통해 작업공간 경계, 물체 역학 안전성, 로봇 운동학 제약을 통합하여 관리한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 인간형 로봇 텔레조작을 위한 실질적이고 중요한 문제를 다루며, 미분 가능한 도달 가능성 평가, 개선된 CBF, 3계층 계층적 제어 프레임워크 등 기술적으로 건실한 해결책을 제시한다. 하드웨어 실증 결과는 실용성을 보여주나, 모델링 불확실성 강건성과 동적 환경 적응성에 대한 깊이 있는 분석이 추가되면 더욱 완성도 높은 연구가 될 것으로 판단된다.