Essence
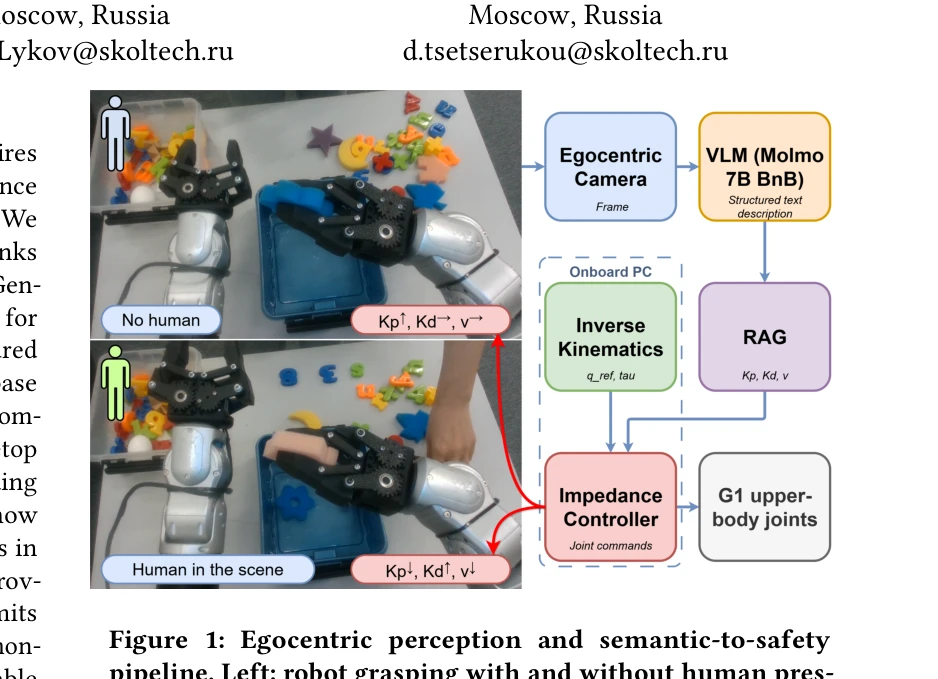
Figure 1: Egocentric perception and semantic-to-safety
SafeHumanoid는 Vision Language Model(VLM)과 Retrieval-Augmented Generation(RAG)을 활용하여 휴머노이드 로봇의 임피던스와 속도를 동적으로 조정하는 시스템으로, 인간-로봇 상호작용 시 안전성과 작업 완료를 동시에 달성한다.
저자: Yara Mahmoud, Jeffrin Sam, Nguyen Khang, Marcelino Fernando, Issatay Tokmurziyev, Miguel Altamirano Cabrera, Muhammad Haris Khan, Artem Lykov, Dzmitry Tsetserukou | 날짜: 2025-11-28 | URL: https://arxiv.org/abs/2511.23300 📄 PDF
Figure 1: Egocentric perception and semantic-to-safety
SafeHumanoid는 Vision Language Model(VLM)과 Retrieval-Augmented Generation(RAG)을 활용하여 휴머노이드 로봇의 임피던스와 속도를 동적으로 조정하는 시스템으로, 인간-로봇 상호작용 시 안전성과 작업 완료를 동시에 달성한다.
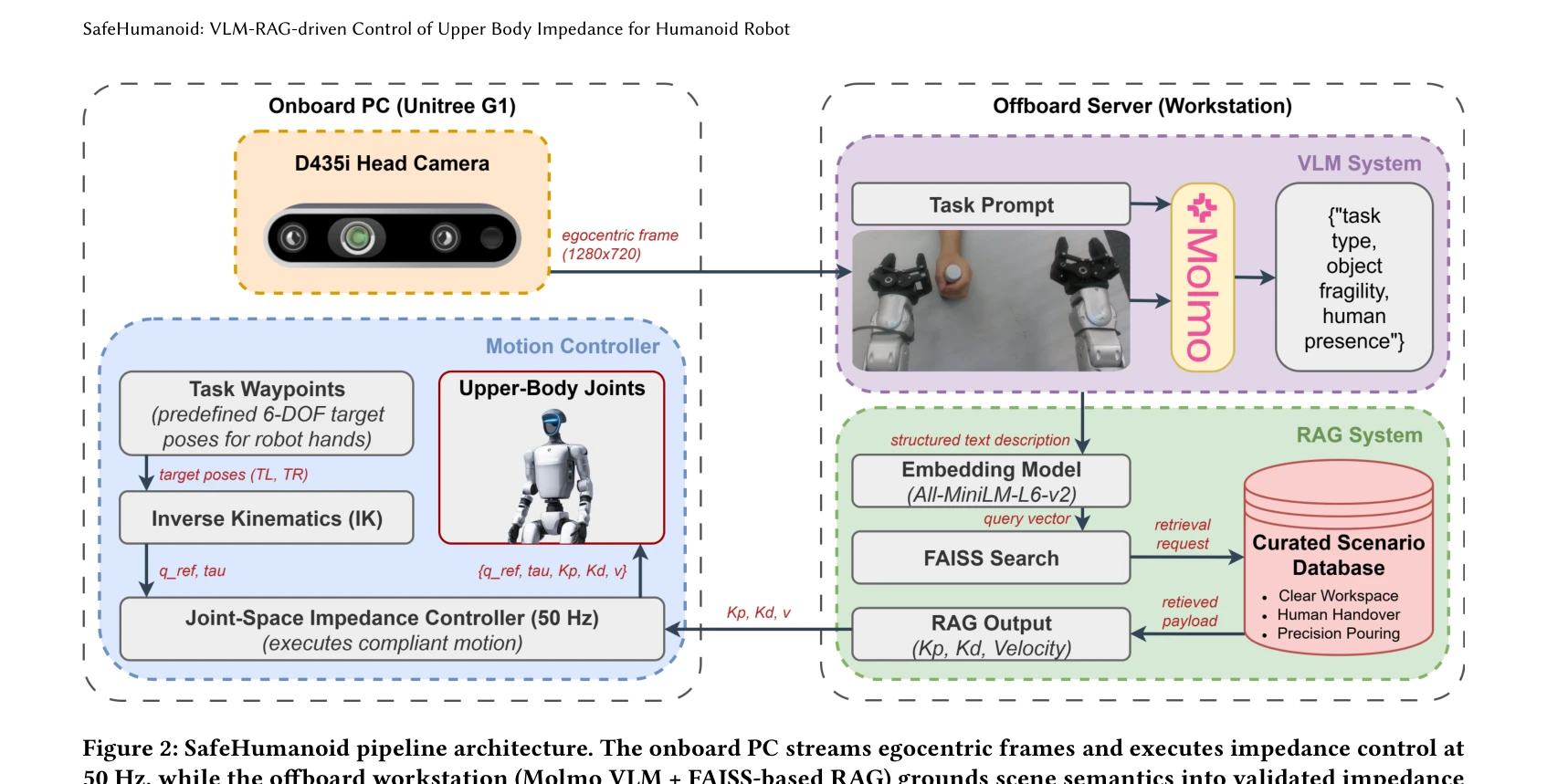
Figure 2: SafeHumanoid pipeline architecture. The onboard PC streams egocentric frames and executes impedance control at
Figure 2: SafeHumanoid pipeline architecture. The onboard PC streams egocentric frames and executes impedance control at
총평: SafeHumanoid는 의미론적 추론과 임피던스 제어의 혁신적 결합으로 인간-로봇 협력의 안전성을 크게 향상시키는 제안이지만, 추론 지연시간과 실시간성은 실제 배포를 위해 해결해야 할 주요 과제이다.