Essence
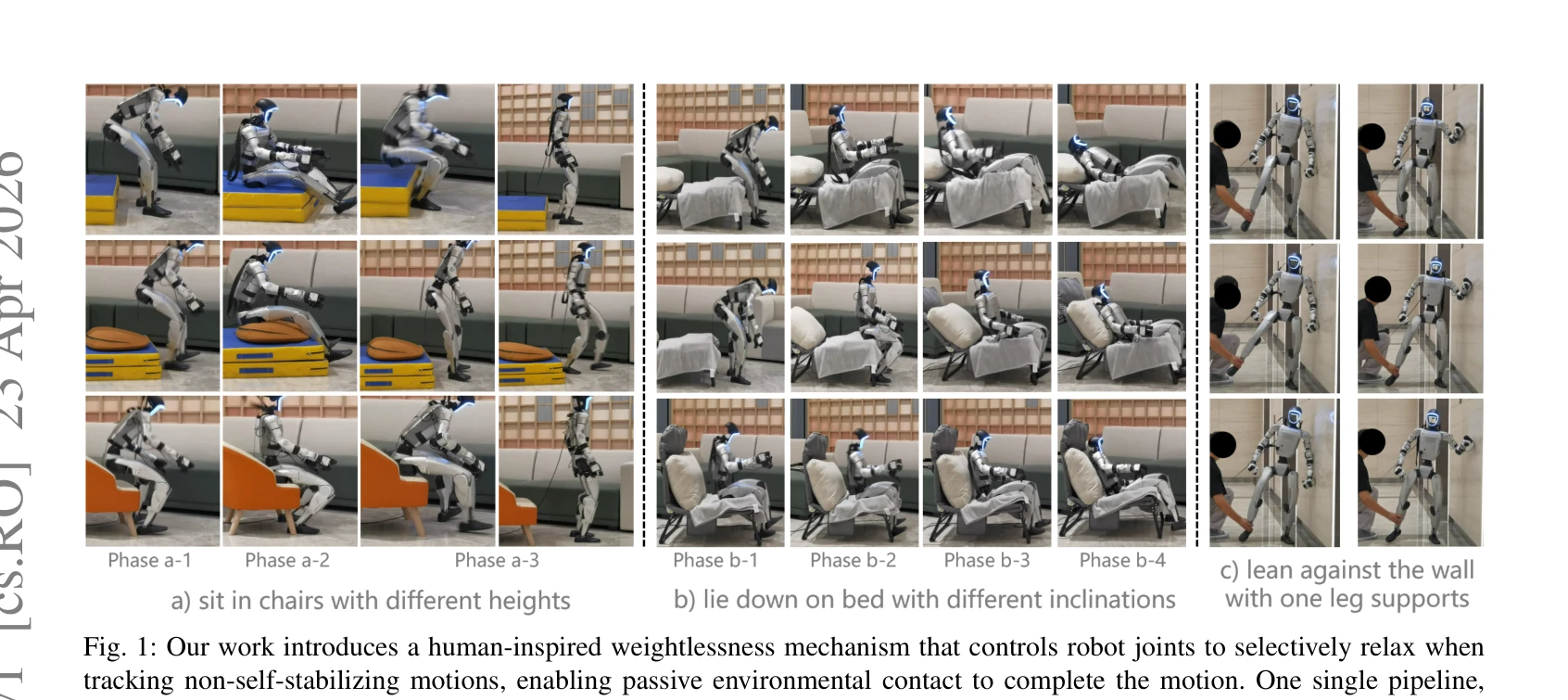
Fig. 1: Our work introduces a human-inspired weightlessness mechanism that controls robot joints to selectively relax wh
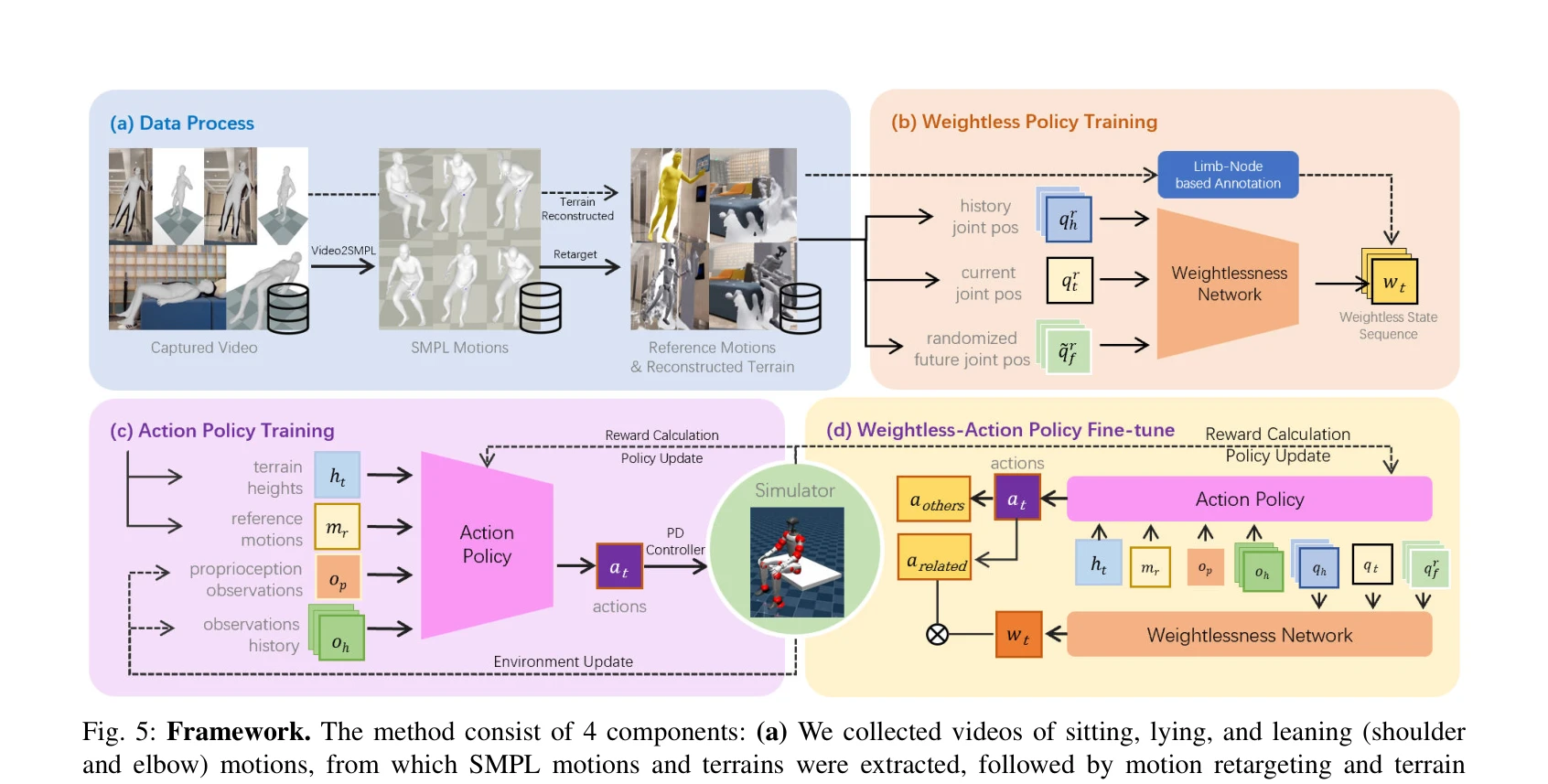
휴머노이드 로봇이 비자기안정화(non-self-stabilizing) 동작을 수행할 때 인간의 '무중력 상태' 메커니즘을 모방하여 특정 관절을 선택적으로 이완시킴으로써 환경과의 물리적 접촉을 통해 동작을 완성하는 방법을 제안한다.