Essence
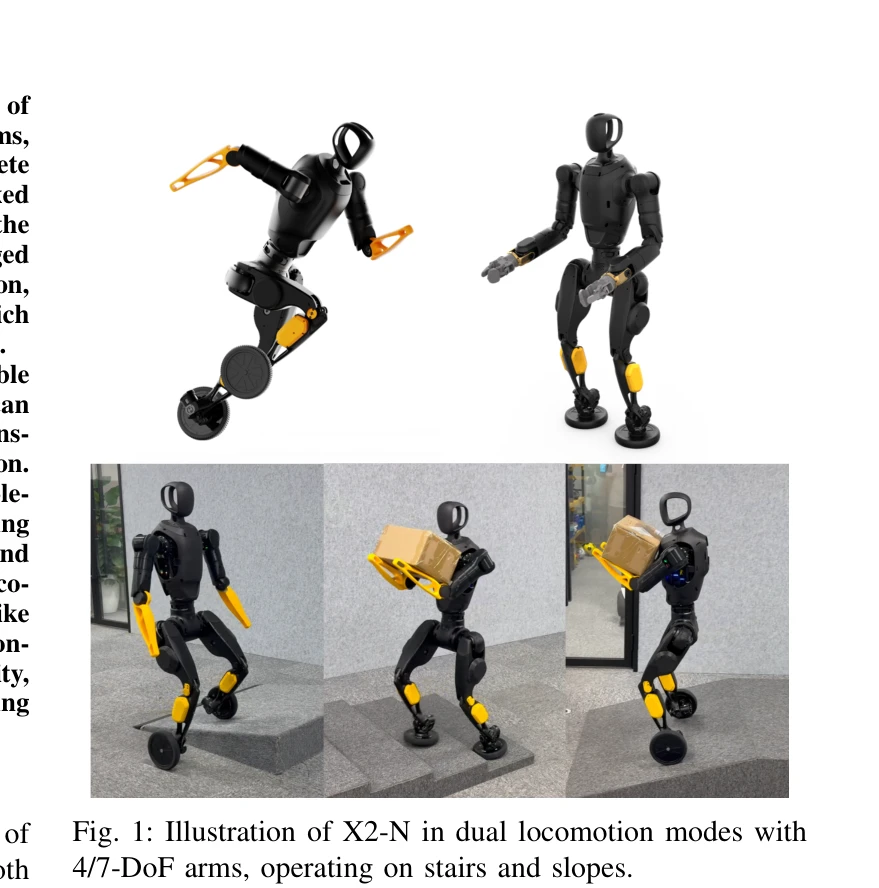
Fig. 1: Illustration of X2-N in dual locomotion modes with
X2-N은 휠-레그 하이브리드 모드와 휴머노이드 풋 모드를 유연하게 변환하며 운영할 수 있는 고자유도 로봇으로, RL 기반 통합 제어 프레임워크로 효율적 이동과 정교한 조작을 동시에 수행한다.
저자: Yan Ning, Xingzhou Chen, Delong Li, Hao Zhang, Hanfu Gai, Tongyuan Li | 날짜: 2026-04-23 | URL: https://arxiv.org/abs/2604.21541 📄 PDF
Fig. 1: Illustration of X2-N in dual locomotion modes with
X2-N은 휠-레그 하이브리드 모드와 휴머노이드 풋 모드를 유연하게 변환하며 운영할 수 있는 고자유도 로봇으로, RL 기반 통합 제어 프레임워크로 효율적 이동과 정교한 조작을 동시에 수행한다.
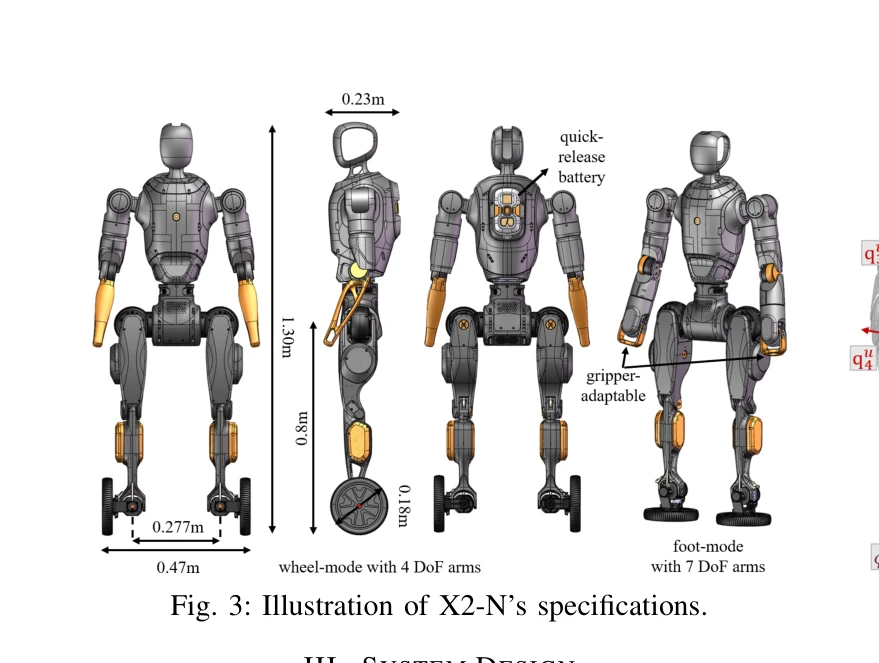
Fig. 3: Illustration of X2-N’s specifications.
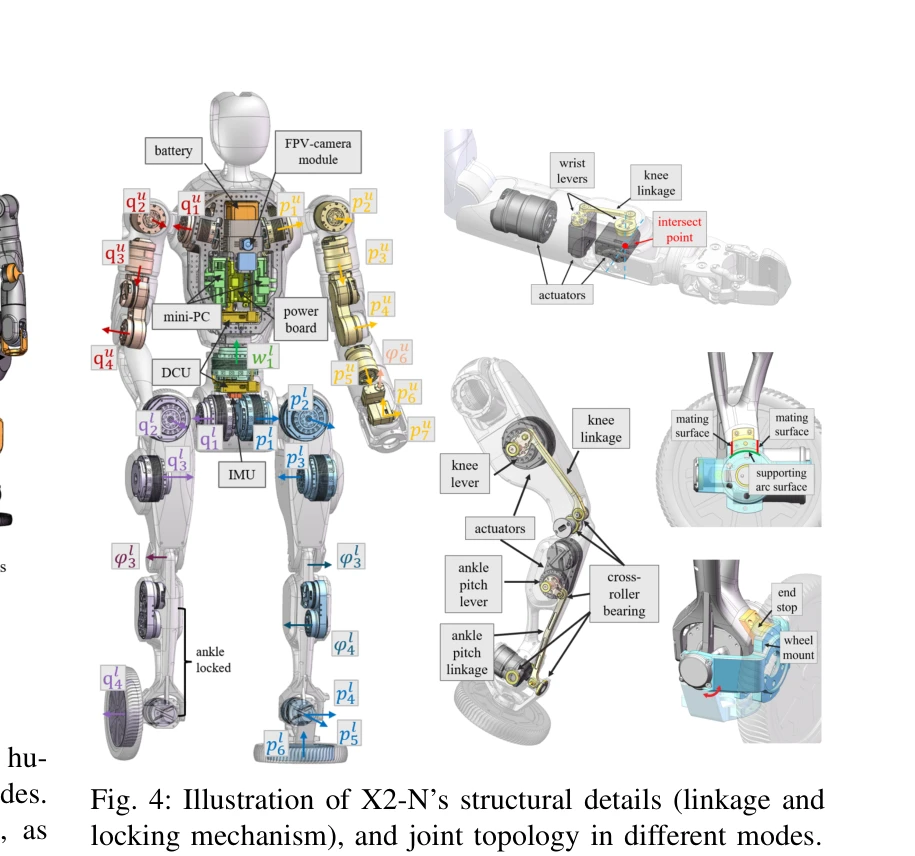
Fig. 4: Illustration of X2-N’s structural details (linkage and
총평: X2-N은 휠-레그와 휴머노이드 로봇의 장점을 창의적으로 통합한 혁신적 플랫폼으로, Joint reuse 기반의 우아한 메커니즘 설계와 RL·모델 기반 제어의 효과적 결합을 통해 실용성 높은 솔루션을 제시한다.