Essence
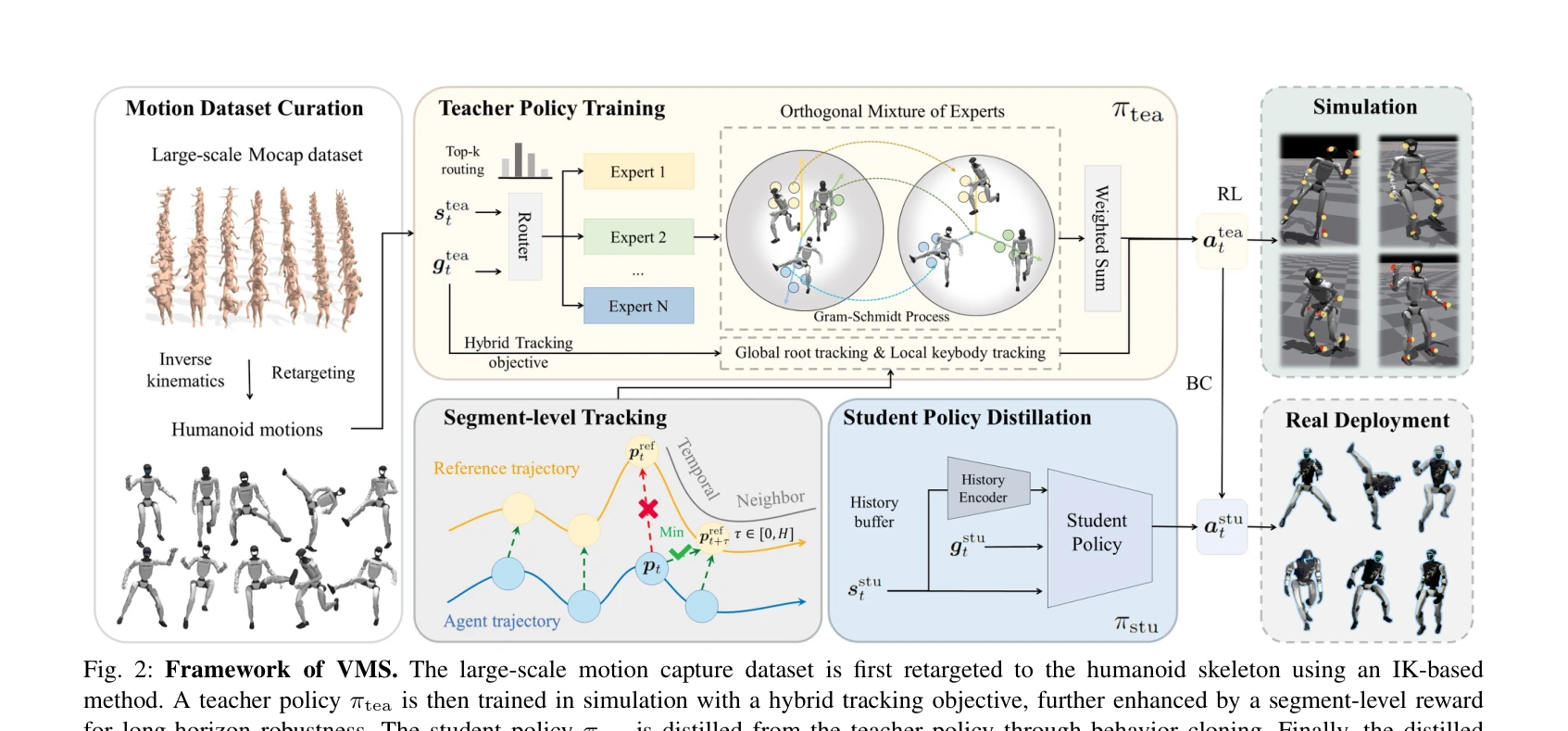
Fig. 2: Framework of VMS. The large-scale motion capture dataset is first retargeted to the humanoid skeleton using an I
VMS는 Orthogonal Mixture-of-Experts (OMoE) 아키텍처와 하이브리드 추적 목표를 결합하여 단일 정책으로 다양한 동작을 수행하는 휴머노이드 로봇 제어기를 제시한다. 장시간 시퀀스에서 안정적인 성능과 높은 동작 충실도를 달성한다.