Essence
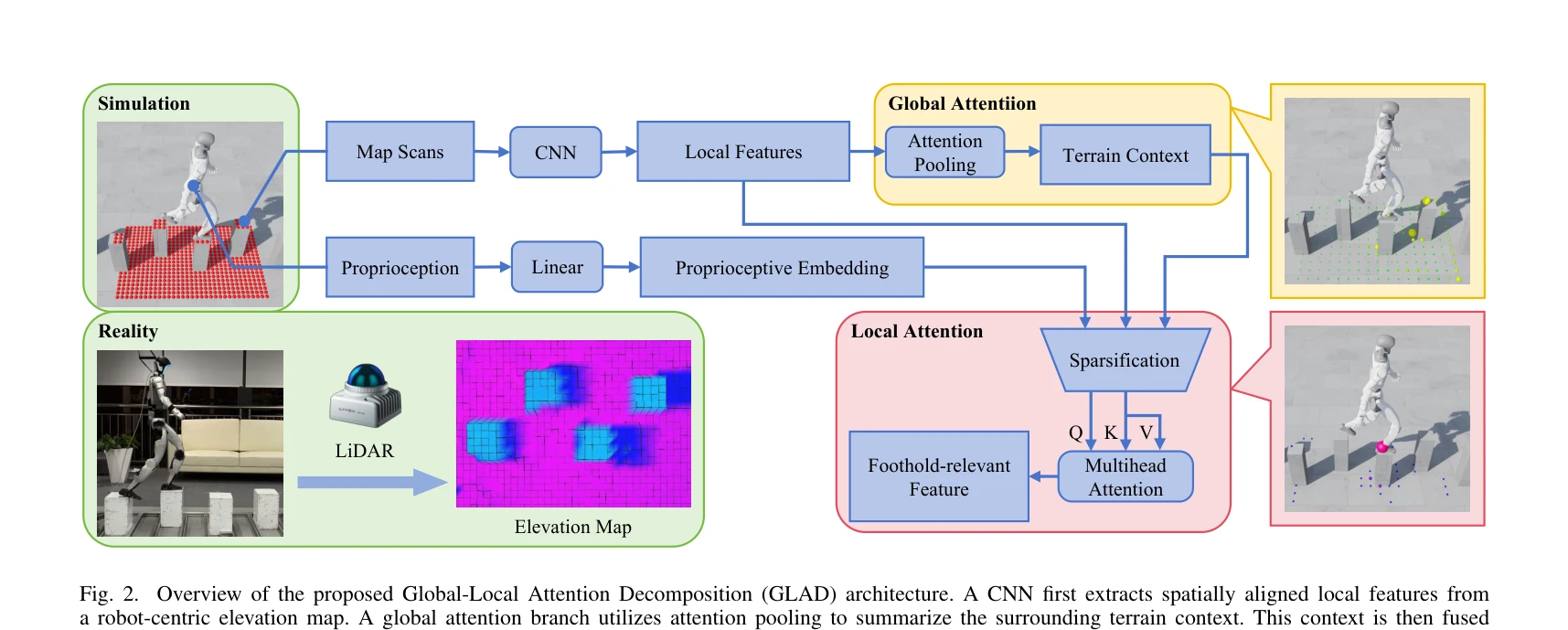
Fig. 2.
본 논문은 인간형 로봇의 지형 인식 보행을 위해 Global-Local Attention Decomposition (GLAD)이라는 새로운 terrain encoder를 제안한다. 광범위한 지형 맥락 이해와 정확한 발판 선택이라는 두 가지 지각 목표를 명시적으로 분리함으로써 sparse-foothold terrain에서의 안정적인 보행을 달성한다.
저자: Shengcheng Fu, Yang Zhang, Zhanxiang Cao, Liyun Yan, Yizhi Chen, Yunpeng Yin, Yue Gao | 날짜: 2026 | DOI: 10.48550/ARXIV.2606.00637 📄 PDF
Fig. 2.
본 논문은 인간형 로봇의 지형 인식 보행을 위해 Global-Local Attention Decomposition (GLAD)이라는 새로운 terrain encoder를 제안한다. 광범위한 지형 맥락 이해와 정확한 발판 선택이라는 두 가지 지각 목표를 명시적으로 분리함으로써 sparse-foothold terrain에서의 안정적인 보행을 달성한다.
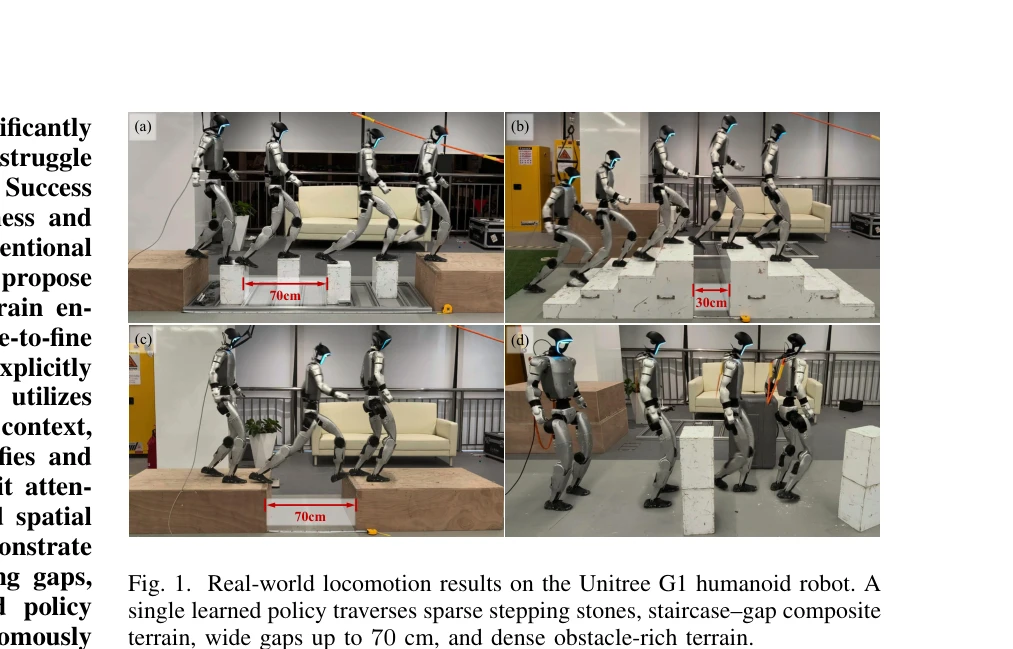
Fig. 1. Real-world locomotion results on the Unitree G1 humanoid robot. A
• GLAD는 sparse-foothold terrain(stepping stone, staircase, 70cm 이상의 gap)에서 안정적인 보행을 가능하게 함.
• 명시적 navigation planner 없이 간단한 velocity command만으로 narrow path 추종, obstacle 회피 등의 emergent terrain-responsive 행동을 나타냄.
• Unitree G1 humanoid robot에 onboard LiDAR 기반 elevation map을 사용하여 zero-shot sim-to-real transfer 달성.
Fig. 2.
• CNN을 통한 robot-centric elevation map의 spatially aligned local feature 추출
• Global attention branch: attention pooling으로 주변 지형 맥락 요약
• Local attention branch: state-conditioned sparsification과 MHA로 foothold 관련 geometry 인코딩
• 두 branch의 결과를 결합하여 locomotion policy에 제공
• Reinforcement learning 프레임워크 내에서 end-to-end 학습
• Global과 local attention의 명시적 분리라는 아키텍처 설계가 기존 방식(두 목표를 단일 attention mechanism에 혼재)과 차별화됨.
• State-conditioned local feature sparsification이라는 효율성 개선 메커니즘 도입.
• Coarse-to-fine encoder 구조로 broad context와 fine-grained geometry를 동시에 처리하는 설계.
• Emergent navigation 행동의 발현을 natural한 RL 학습 결과로 제시.
• 논문은 terrain-specific curriculum이나 expert policy에의 의존도는 감소시키지만, elevation map 기반 접근이 가지는 본질적 한계(예: occluded region의 처리)에 대한 논의 부족.
• Zero-shot sim-to-real transfer의 성공이 보고되었으나, 실패 사례나 한계 환경에 대한 분석 미흡.
• Global과 local attention branch의 상대적 기여도 분석이나 각 branch의 필수성에 대한 ablation study 결과가 제시되지 않음.
• 다른 terrain encoder (AME, AME-2 등)과의 직접적인 정량적 비교 평가 부재.
총평: 본 논문은 인간형 로봇의 sparse-foothold 보행을 위해 attention mechanism의 역할을 명시적으로 분리하는 GLAD를 제안하며, 이론적 동기부여가 명확하고 실제 로봇 배포에서 우수한 성능을 달성했다는 점에서 의미 있는 기여를 한다. 다만, 더 철저한 ablation study와 기존 방법과의 정량적 비교가 보충되면 더욱 강력한 논문이 될 것이다.