Essence
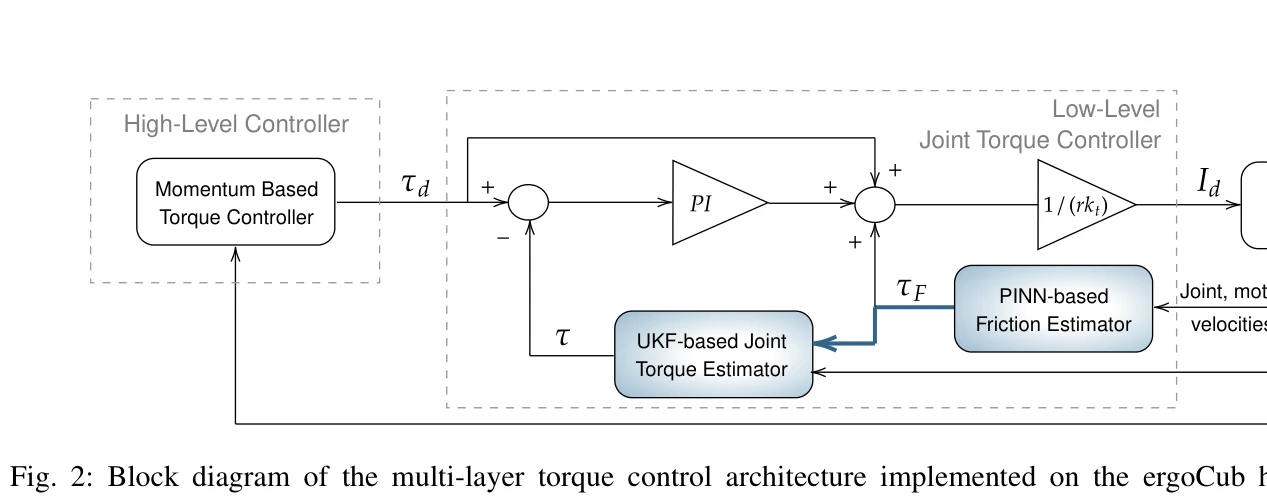
Fig. 2: Block diagram of the multi-layer torque control architecture implemented on the ergoCub humanoid robot. The
본 논문은 Physics-Informed Neural Networks (PINNs)와 Unscented Kalman Filter (UKF)를 결합하여 휴머노이드 로봇의 관절 토크 센서 없이 전신 토크 제어를 수행하는 프레임워크를 제시한다. 이 방식은 마찰 모델링과 토크 추정을 통합하여 실시간 토크 제어 아키텍처를 구현한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 PINNs과 UKF의 혁신적 통합을 통해 센서 없는 토크 제어라는 실질적 문제를 해결하며, ergoCub에서의 엄밀한 실험 검증과 확장성 시연으로 휴머노이드 로봇의 실시간 준수 제어를 위한 강력한 기초를 제공한다.
같이 보면 좋은 논문
기반 연구
The invariant extended Kalman filter as a stable observer 논문은 상태 추정의 이론적 기반을 제공하여 본 연구의 UKF 적용 이유를 명확히 해줍니다.
기반 연구
Contact-Aided Invariant Extended Kalman Filtering은 마찰 및 접촉 추정 기반 전신 상태 추정에서 제어 적합성 및 Kalman 필터 확장에 대한 이론적 배경을 제공합니다.
기반 연구
PINN(Physics-Informed Neural Networks) 이론과 주요 응용 및 문제점을 심도 있게 다루므로, 본 논문의 프레임워크 이해에 이론적 기반을 제공합니다.
기반 연구
PINN 및 그 확장 기법의 이론적·실전적 논의를 제공해, UKF 결합 PINN의 발전 맥락을 이해하는 데 기반이 됩니다.
기반 연구
Neural Operator 및 데이터 기반 동역학 시스템의 실제 적용과 검증 사례를 다뤄, 621의 PINN 확장 버전 개발의 기반이 된다.
기반 연구
AutoOdom 논문은 오토리그레시브 방식으로 관절 토크와 상태 추정을 결합해, UKF 기반 신경망 구조의 실시간 제어에 이론적 기반을 제공합니다.
기반 연구
Physics-Informed Neural Networks with Unscented Kalman Filter 논문은 PINN과 칼만 필터 결합의 원리를 소개해 Neural EnKF 논문의 기반이 된다.
기반 연구
621의 물리정보신경망과 칼만필터 결합 개념은 3377의 자동재현·성능 최적화를 위한 신뢰성 있고 누적 가능한 환경 구현에 기초가 될 수 있습니다.
기반 연구
Physics-Informed Neural Networks with Unscented Kalman Filter 논문은 PINN의 state-복원 및 파라미터 식별 통합 문제에 직접적으로 영감을 주었다.
다른 접근
샘플 효율·일반화 문제를 강화학습·최적화(1차 정책, sharpness-aware)로 해결하려는 다른 로봇 제어방식입니다.
다른 접근
과학 LLM 및 파운데이션 모델에 대한 종합 서베이로, PINN과는 다른 AI 기반 과학기술 문제 접근을 보여줍니다.
다른 접근
Geometry-Aware Predictive Safety Filters on Humanoids 논문은 접촉 및 힘 추정의 안전성 측면에서 다른 최적화적 접근법을 보여줍니다.
다른 접근
UKF와 같이 외부 정보 동기화를 사용하는 PINN 변형과 gradient-free estimator의 적용 차이를 정확하게 파악할 수 있습니다.
후속 연구
Physics-Informed Neural Networks에 Unscented Kalman Filter처럼 추가적인 불확실성 추론법을 결합한 응용사례입니다.
후속 연구
LLM 기반 과학적 가설 생성 및 매핑 능력의 평가를 통해, 621의 PINN-Kalman 융합방법이 실세계 문제 해결에 미치는 영향을 분석한다.
후속 연구
PINN 기반 실시간 토크 제어 프레임워크가 실제 로봇 시스템에서 검증됨으로써 이론적 모델의 확장 및 실용성을 보강합니다.
응용 사례
PINN과 Unscented Kalman Filter의 결합을 통해 3390의 이론을 로봇 제어 분야에 실제 적용한 사례다.