Essence
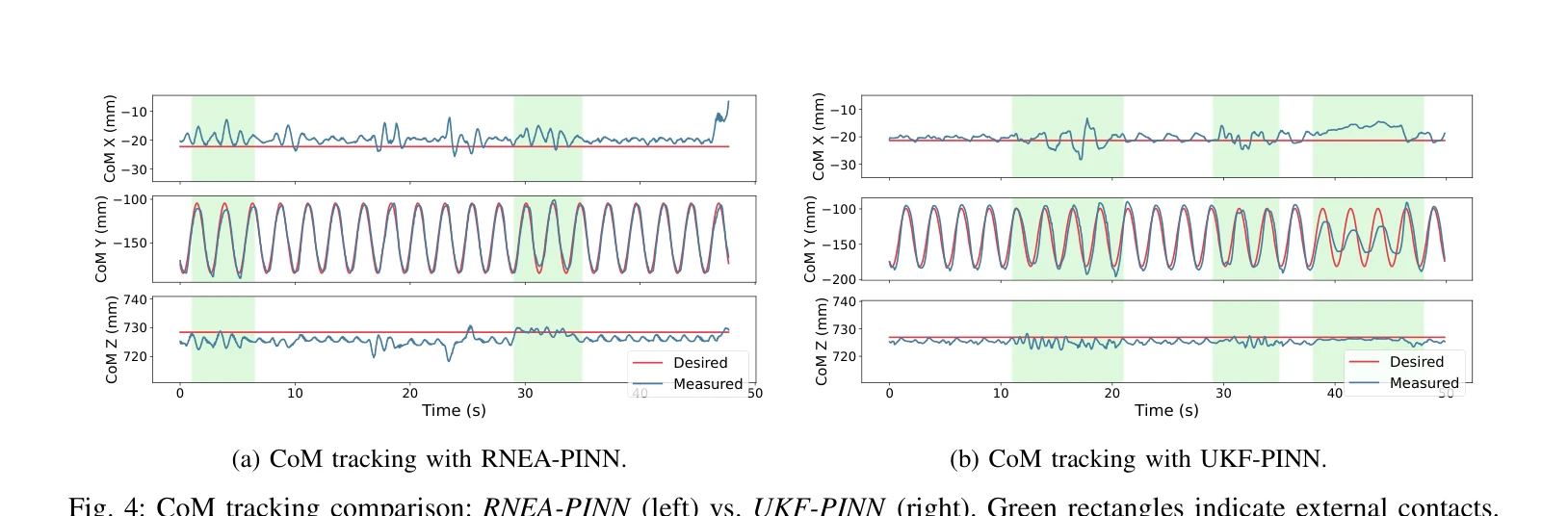
Fig. 4: CoM tracking comparison: RNEA-PINN (left) vs. UKF-PINN (right). Green rectangles indicate external contacts.
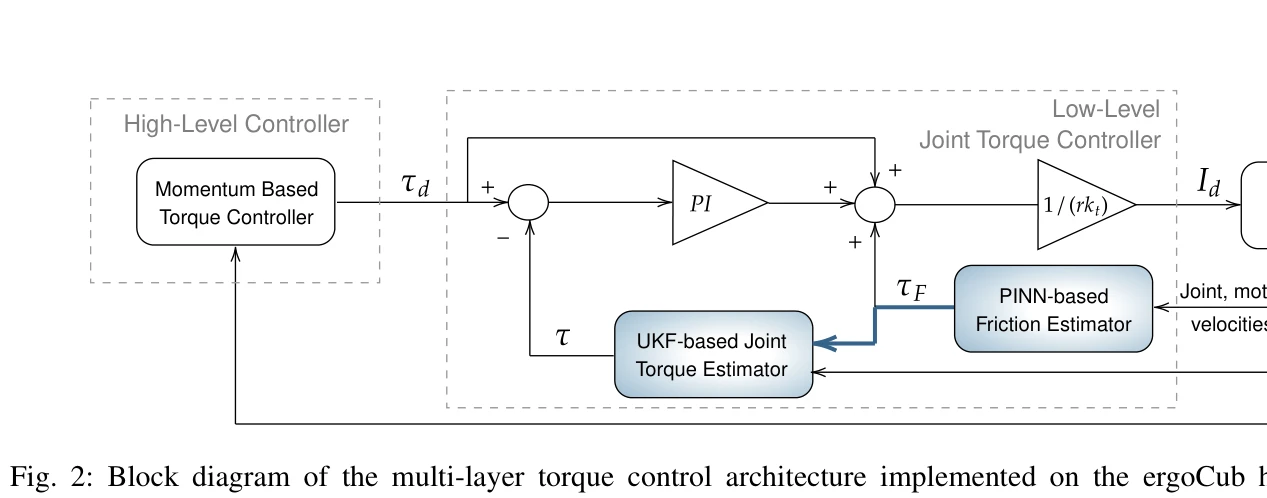
본 논문은 휴머노이드 로봇의 joint torque 센서를 사용하지 않고 토크 제어를 수행하기 위해 PINN을 활용한 마찰 모델링과 UKF 기반 joint torque 추정을 통합하는 프레임워크를 제시한다. 이 접근법은 high-ratio harmonic drive를 탑재한 전기 모터 시스템에서 실시간 sensorless torque control을 가능하게 한다.
Achievement
Fig. 4: CoM tracking comparison: RNEA-PINN (left) vs. UKF-PINN (right). Green rectangles indicate external contacts.
개선된 마찰 모델링: motor와 joint velocity buffer 입력으로 static friction과 dynamic friction을 포착. 확장된 UKF 공식화: fixed-base에서 floating-base 시스템으로 확대. 통합 제어 아키텍처: PINN과 UKF를 real-time torque control 내에 시너지있게 결합. scalable 성능: 서로 다른 마찰 특성을 가진 유사 로봇 플랫폼에서 재식별 없이 일관된 성능 달성. ergoCub 검증: RNEA 대비 torque tracking RMSE 감소, 에너지 효율 향상, disturbance rejection 우수성 입증.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 PINN과 UKF를 통합한 sensorless torque control 프레임워크를 제시하며, 휴머노이드 로봇 제어에서 실질적인 advances를 제공한다. 기술적으로 견고하고 실험적으로 검증되었으나, 실험 범위의 제한과 계산 효율성에 대한 분석 부족이 영향을 미친다. 전반적으로 robotics 커뮤니티에 가치 있는 기여를 한다.