Essence
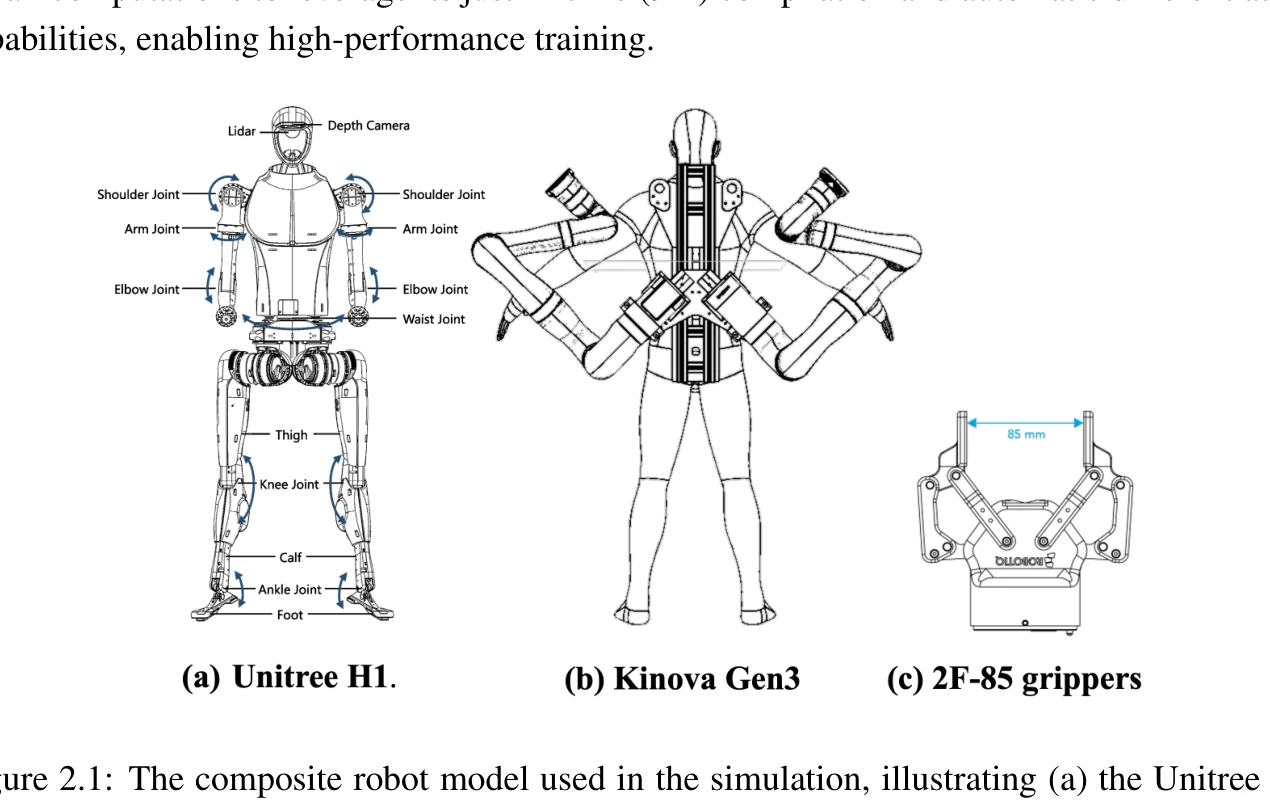
Figure 2.1: The composite robot model used in the simulation, illustrating (a) the Unitree H1
초과 사지(Supernumerary Limbs)가 장착된 인형형 로봇의 안정적인 보행을 위해 학습 기반 저수준 보행 제어와 모델 기반 고수준 동적 평형 제어를 결합한 계층적 제어 아키텍처를 제시한다.
저자: Bowen Zhi | 날짜: 2025-11-25 | URL: https://arxiv.org/abs/2512.00077 📄 PDF
Figure 2.1: The composite robot model used in the simulation, illustrating (a) the Unitree H1
초과 사지(Supernumerary Limbs)가 장착된 인형형 로봇의 안정적인 보행을 위해 학습 기반 저수준 보행 제어와 모델 기반 고수준 동적 평형 제어를 결합한 계층적 제어 아키텍처를 제시한다.
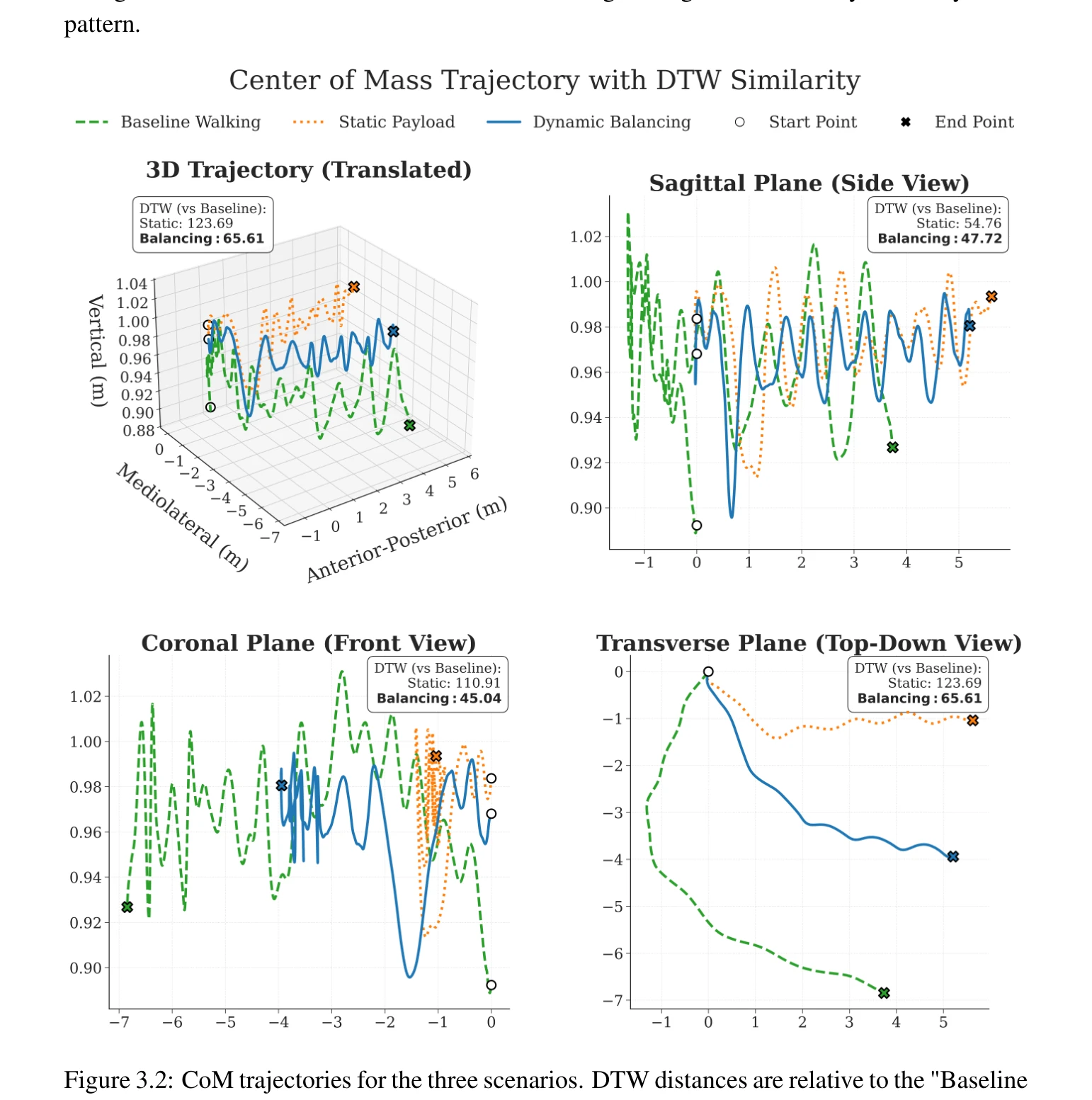
Figure 3.1: Training performance of the PPO agent over 500 million environment steps. (a)
Figure 2.1: The composite robot model used in the simulation, illustrating (a) the Unitree H1
총평: 본 논문은 초과 사지가 장착된 인형형 로봇의 보행 안정성 문제를 해결하기 위해 계층적 제어 구조를 통해 학습 기반과 모델 기반 제어를 효과적으로 결합한 독창적인 접근법을 제시하며, 47% DTW 거리 감소 등 정량적 성과를 입증했다. 다만 실제 하드웨어 검증과 복잡한 환경에서의 평가가 필요하다.