Essence
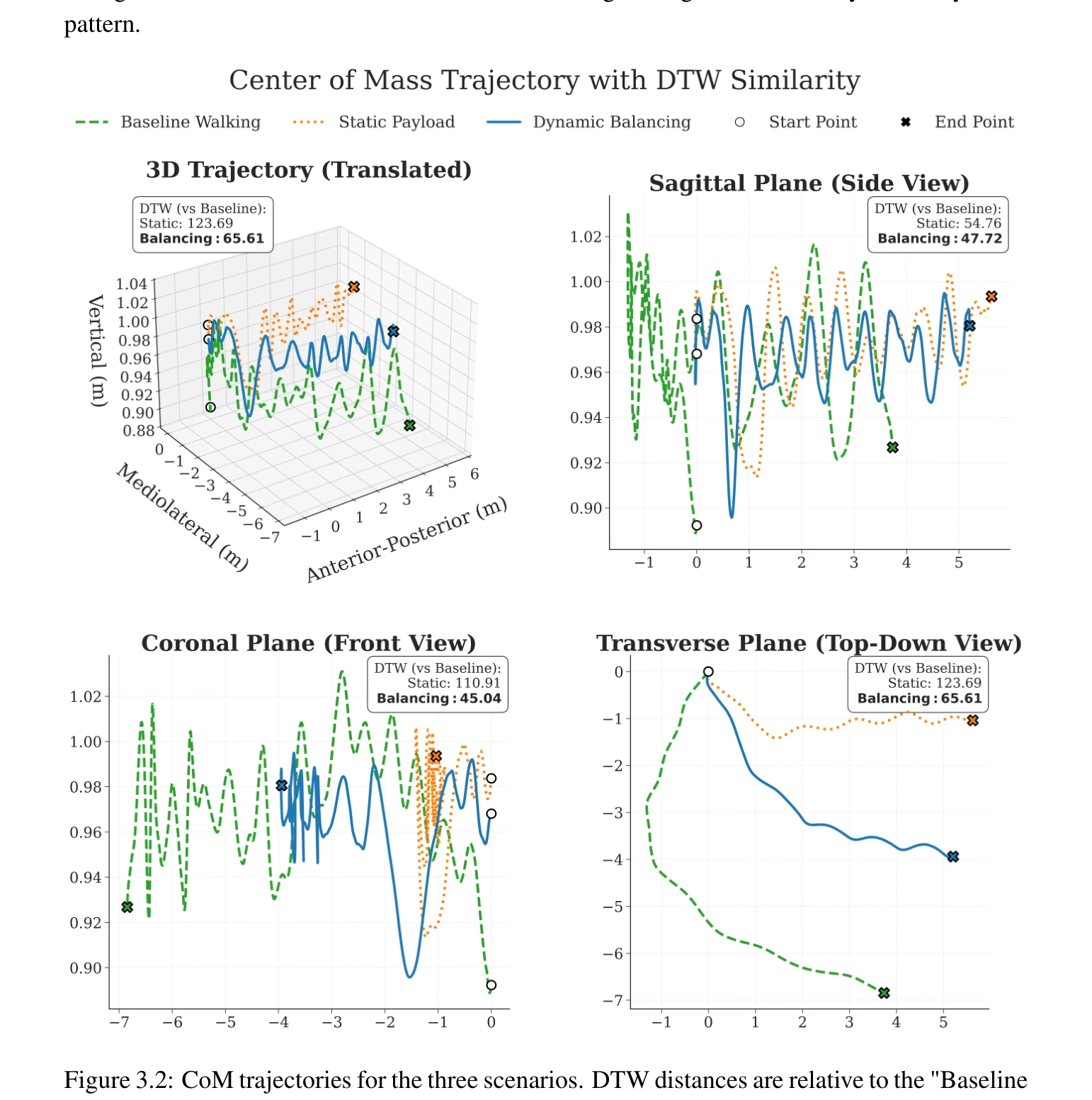
Figure 3.1: Training performance of the PPO agent over 500 million environment steps. (a)
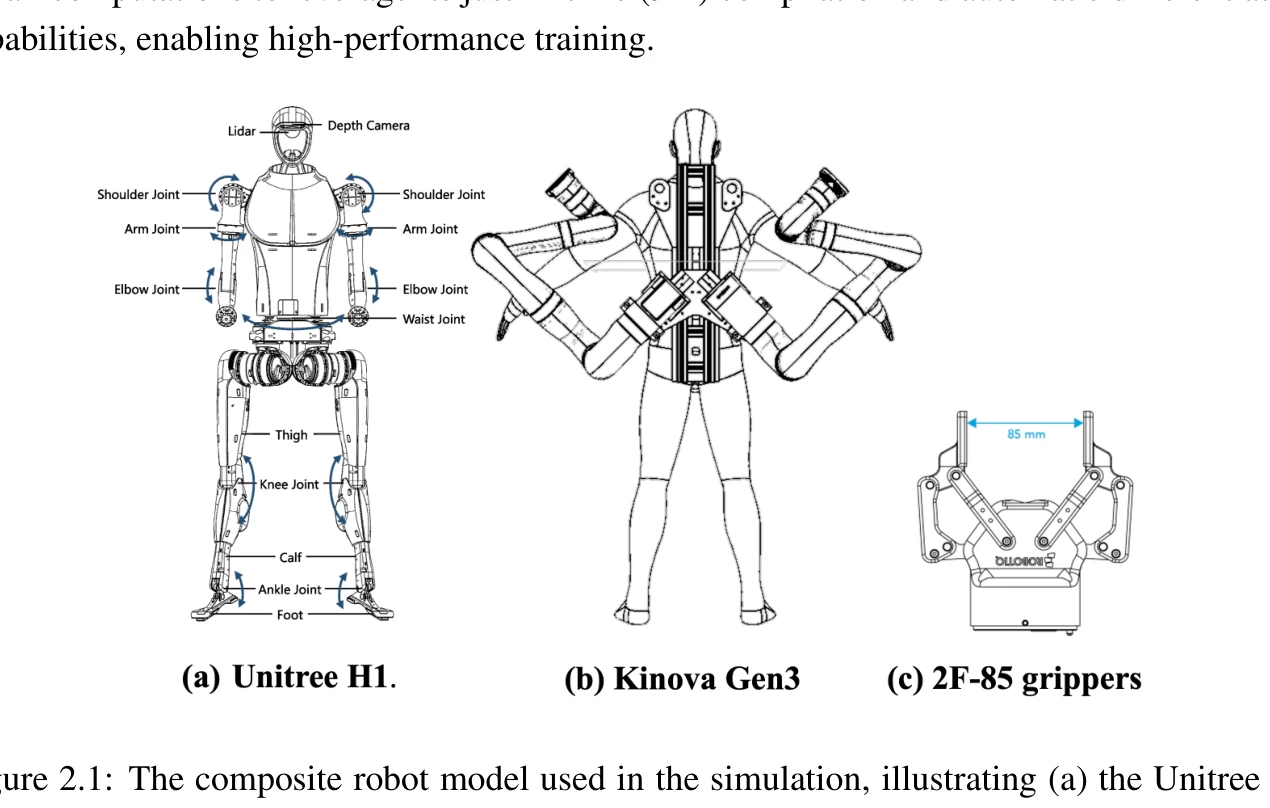
본 논문은 초과 사지(Supernumerary Limbs, SLs)로 증강된 인형로봇(humanoid robot)의 안정적인 보행을 위해 계층적 제어 프레임워크를 제안한다. 학습 기반의 저수준 보행 정책과 모델 기반의 고수준 동적 균형 제어기를 결합한 분리된 접근방식을 통해 SLs로부터의 동적 교란을 효과적으로 완화한다.
Limitation & Further Study
- 물리 시뮬레이션 환경에서만 평가되었으며, 실제 로봇 하드웨어 검증이 부재
- 추가 사지의 무게 제한(30kg 최대)과 특정 로봇 플랫폼(Unitree H1)에 대한 경험적 결과
- 제어 융합 메커니즘의 상세한 안정성 분석 부족
- 불규칙한 지형이나 외부 교란에 대한 성능 평가 미흡
후속 연구: 실제 로봇 하드웨어에서의 검증, 보다 무거운 초과 사지 수용, 비정형 환경에서의 견고성 평가, 다양한 보행 속도와 복합 조작 작업 동시 수행 능력 확대
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 계층적 제어 프레임워크를 통해 초과 사지 장착 인형로봇의 안정적 보행 문제를 창의적으로 해결한다. DRL 기반 보행 정책과 model-based 균형 제어의 결합은 기술적으로 타당하며 47% DTW 개선이라는 정량적 성과를 달성한다. 다만 시뮬레이션 한정 평가와 실제 하드웨어 검증 부재가 실용적 기여도를 제한한다.