Essence
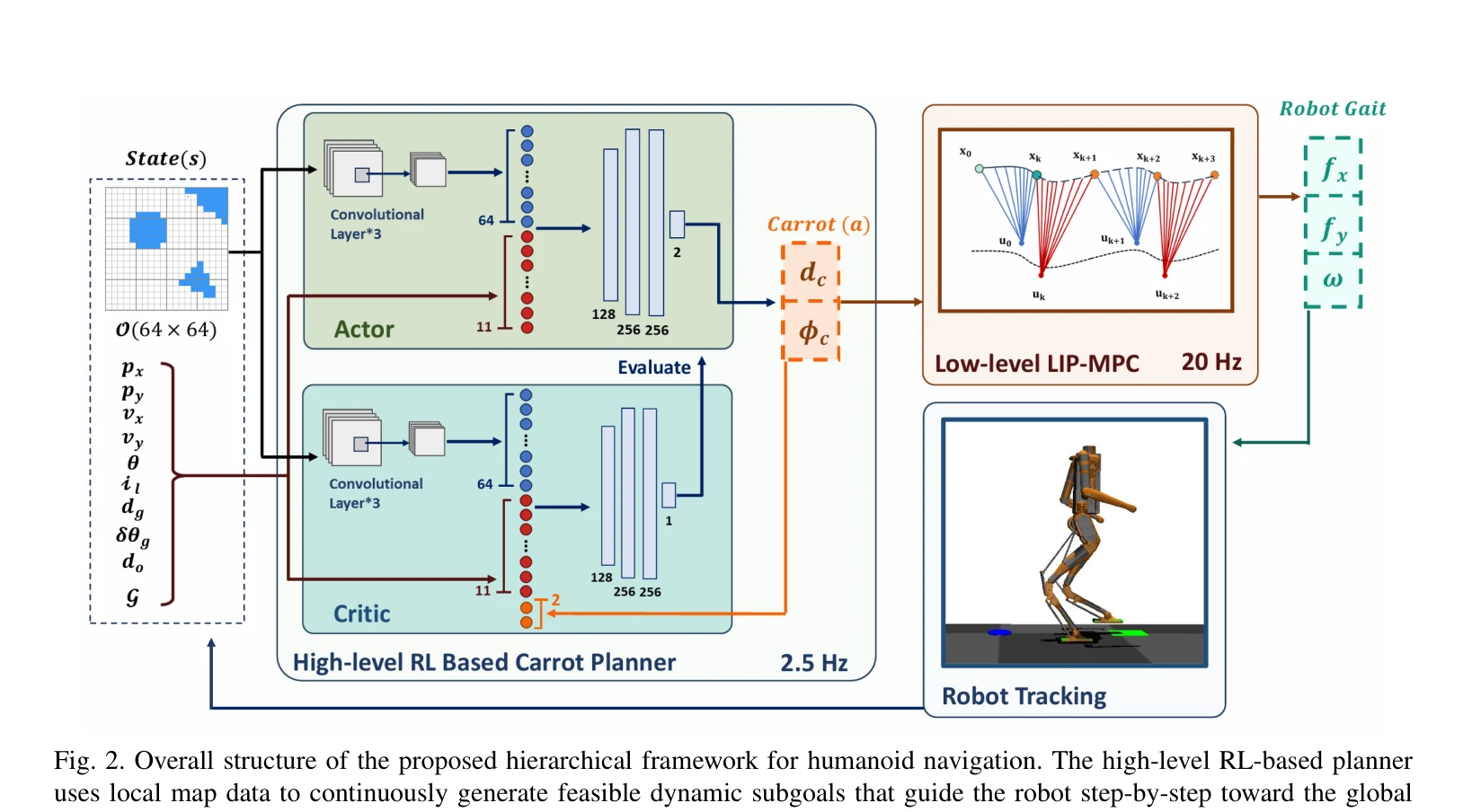
Fig. 2. Overall structure of the proposed hierarchical framework for humanoid navigation. The high-level RL-based planne
Humanoid robot navigation을 위해 고수준 RL 기반 동적 subgoal 생성기와 저수준 MPC 기반 보행 제어기를 결합한 계층적 프레임워크를 제안하며, data bootstrapping 기법으로 학습을 안정화한다.