저자: Quanyou Wang, Mingzhang Zhu, Ruochen Hou, Kay Gillespie, Alvin Zhu, Shiqi Wang, Yicheng Wang, Gaberiel I. Fernandez, Yeting Liu, Colin Togashi, Hyunwoo Nam, Aditya Navghare, Alex Xu, Taoyuanmin Zhu, Min Sung Ahn, Arturo Flores Alvarez, Justin Quan, Ethan Hong, Dennis W. Hong | 날짜: 2025-12-10 | URL: https://arxiv.org/abs/2512.09431 📄 PDF
Essence
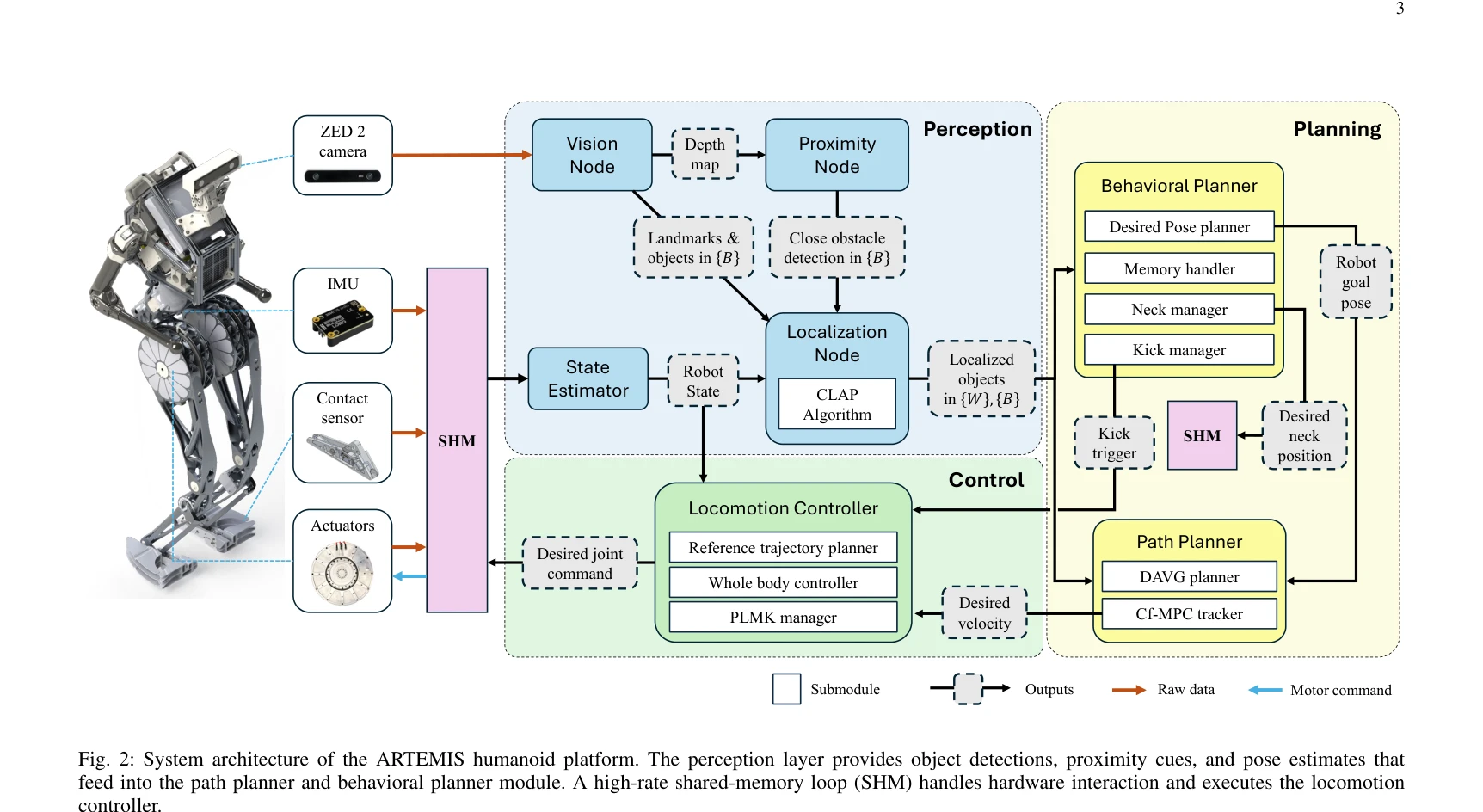
Fig. 2: System architecture of the ARTEMIS humanoid platform. The perception layer provides object detections, proximity
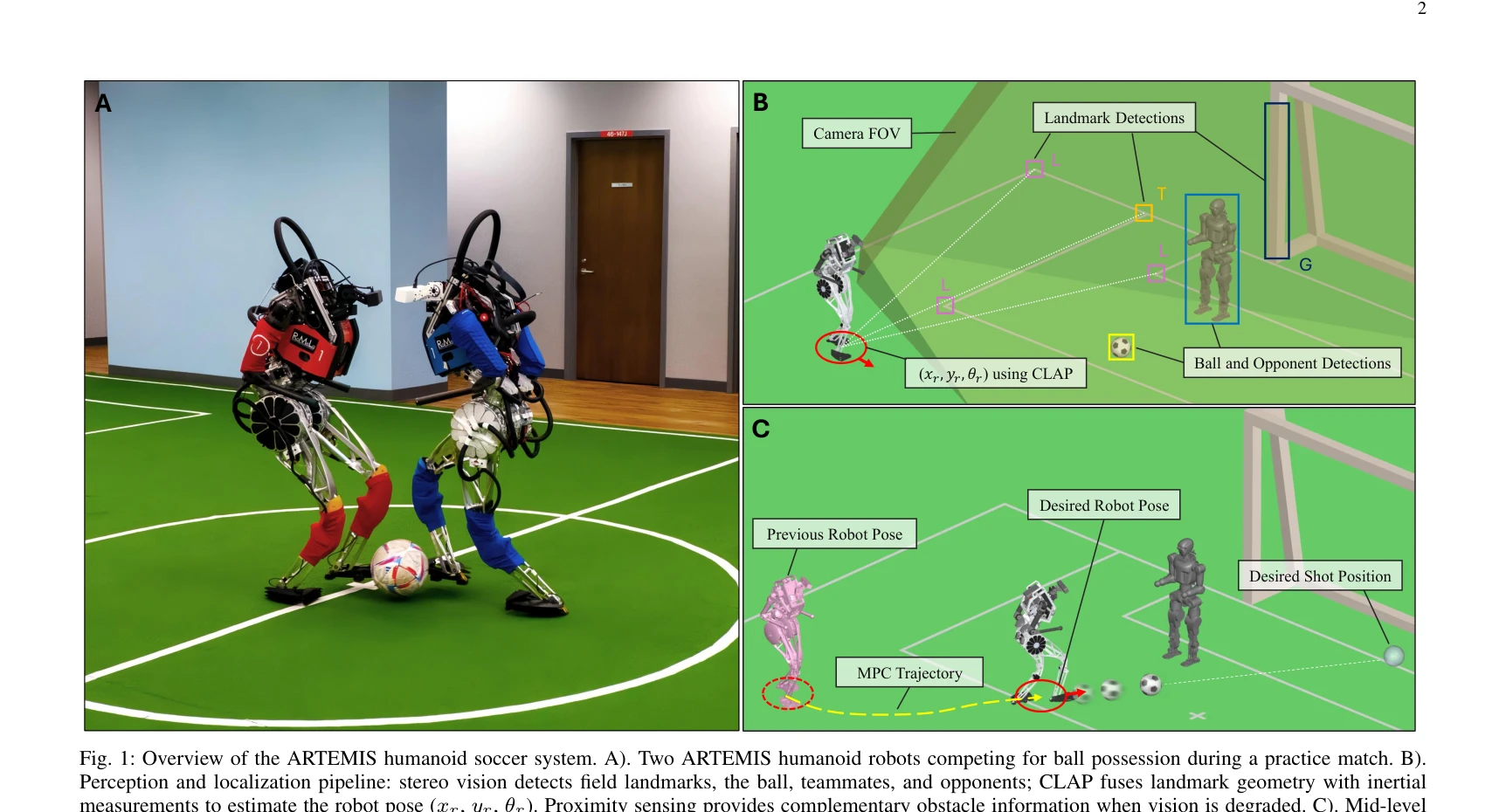
RoboCup 2024 우승팀의 완전히 통합된 성인용 휴머노이드 축구 로봇 시스템으로, QDD 액추에이터 기반 하드웨어와 계층적 perception-planning-control 아키텍처를 결합하여 동적이고 전술적으로 효과적인 게임플레이를 실현했다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: QDD 액추에이터 기반 하드웨어와 perception-planning-control의 tight integration을 통해 RoboCup 우승을 달성한 고성숙도의 시스템으로, 동적 휴머노이드 제어와 실시간 자율 네비게이션의 실제 구현 사례로서 상당한 실질적 가치를 제공한다.