Essence
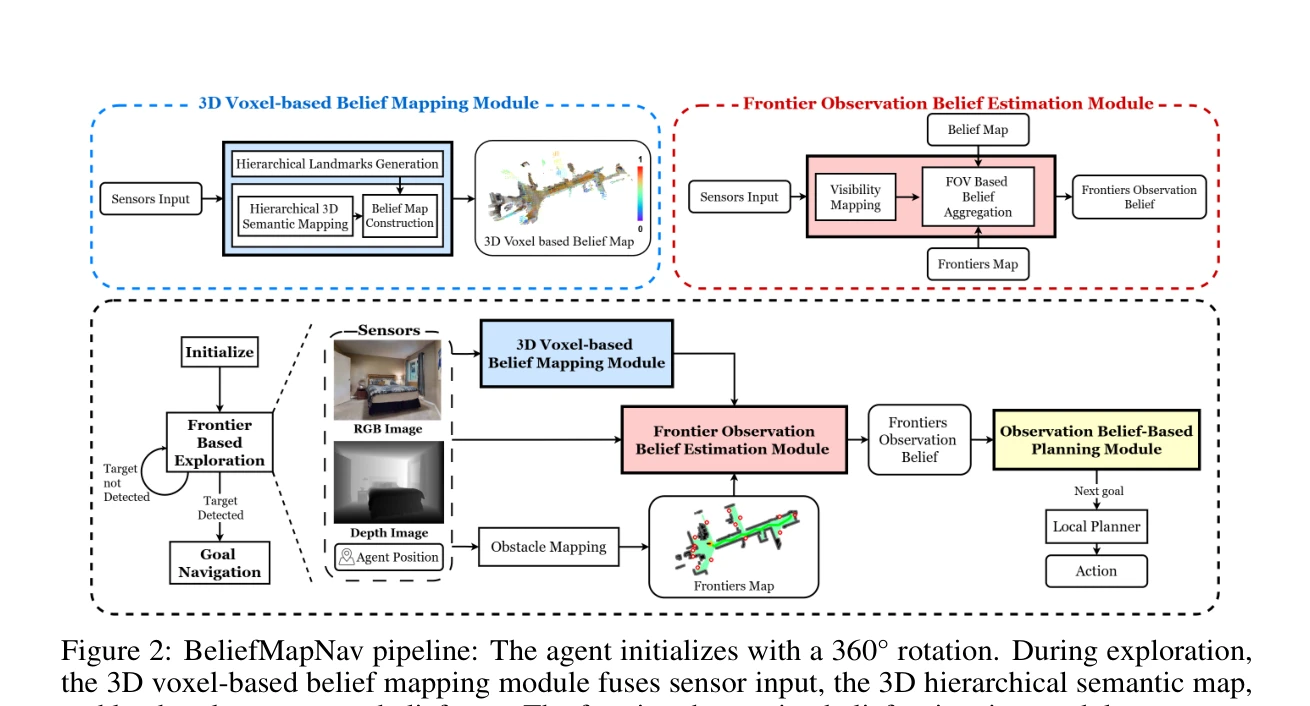
Figure 2: BeliefMapNav pipeline: The agent initializes with a 360° rotation. During exploration,
본 논문은 3D voxel 기반 belief map을 활용하여 zero-shot object navigation에서 LLM의 의미론적 추론과 계층적 공간 정보를 통합함으로써 로봇이 사전 학습이나 사전 구축 맵 없이 자연어로 지정된 대상을 미지의 환경에서 찾을 수 있도록 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 3D voxel-based belief map을 통해 LLM 의미론과 공간 구조를 효과적으로 통합하고 확률 기반 경로 계획으로 zero-shot object navigation 성능을 대폭 향상시킨 우수한 기여이다. 다만 실제 로봇 배치 시 계산 복잡도와 LLM 오류에 대한 강건성 검토가 필요하다.