저자: Yuheng Ji, Huajie Tan, Jiayu Shi, Xiaoshuai Hao, Yuan Zhang, Hengyuan Zhang, Pengwei Wang, Mengdi Zhao, Yao Mu, Pengju An, Xinda Xue, Qinghang Su, Huaihai Lyu, Xiaolong Zheng, Jiaming Liu, Zhongyuan Wang, Shanghang Zhang | 날짜: 2025-02-28 | URL: https://arxiv.org/abs/2502.21257 📄 PDF
Essence
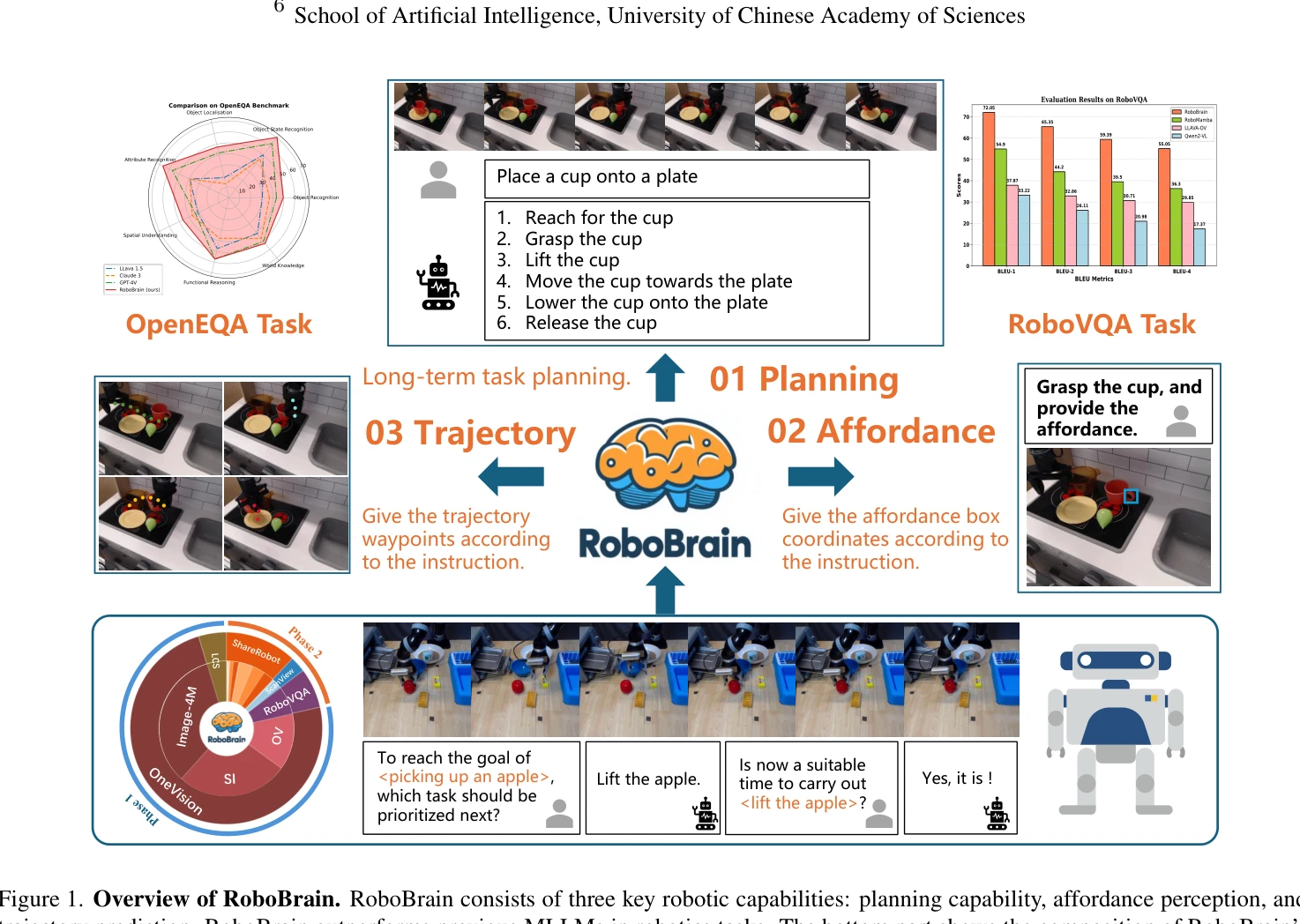
Figure 1. Overview of RoboBrain. RoboBrain consists of three key robotic capabilities: planning capability, affordance p
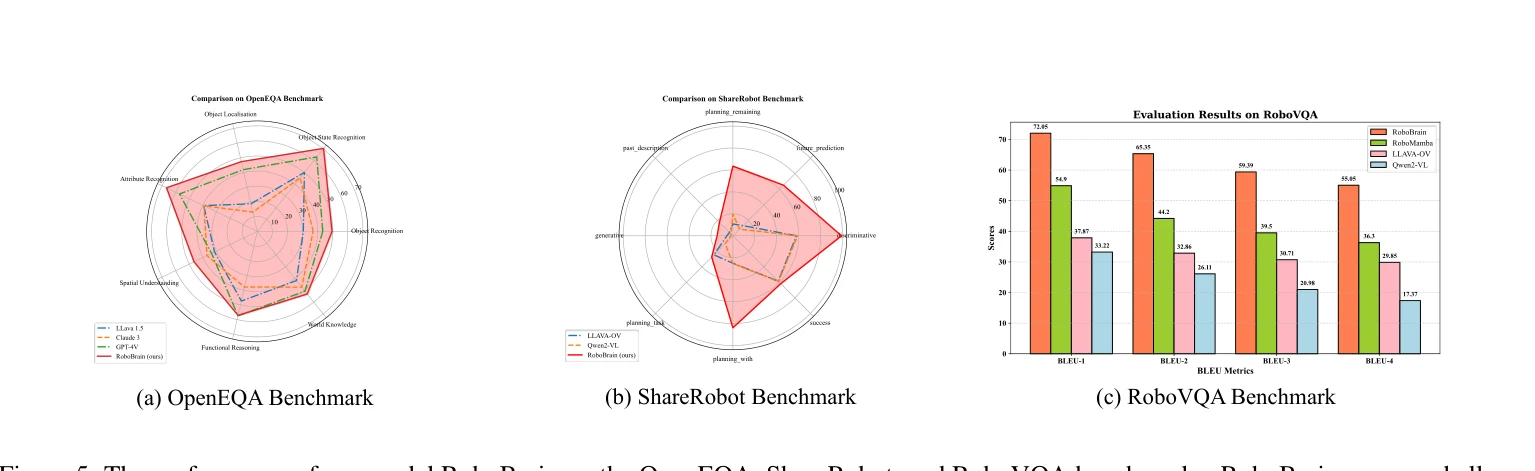
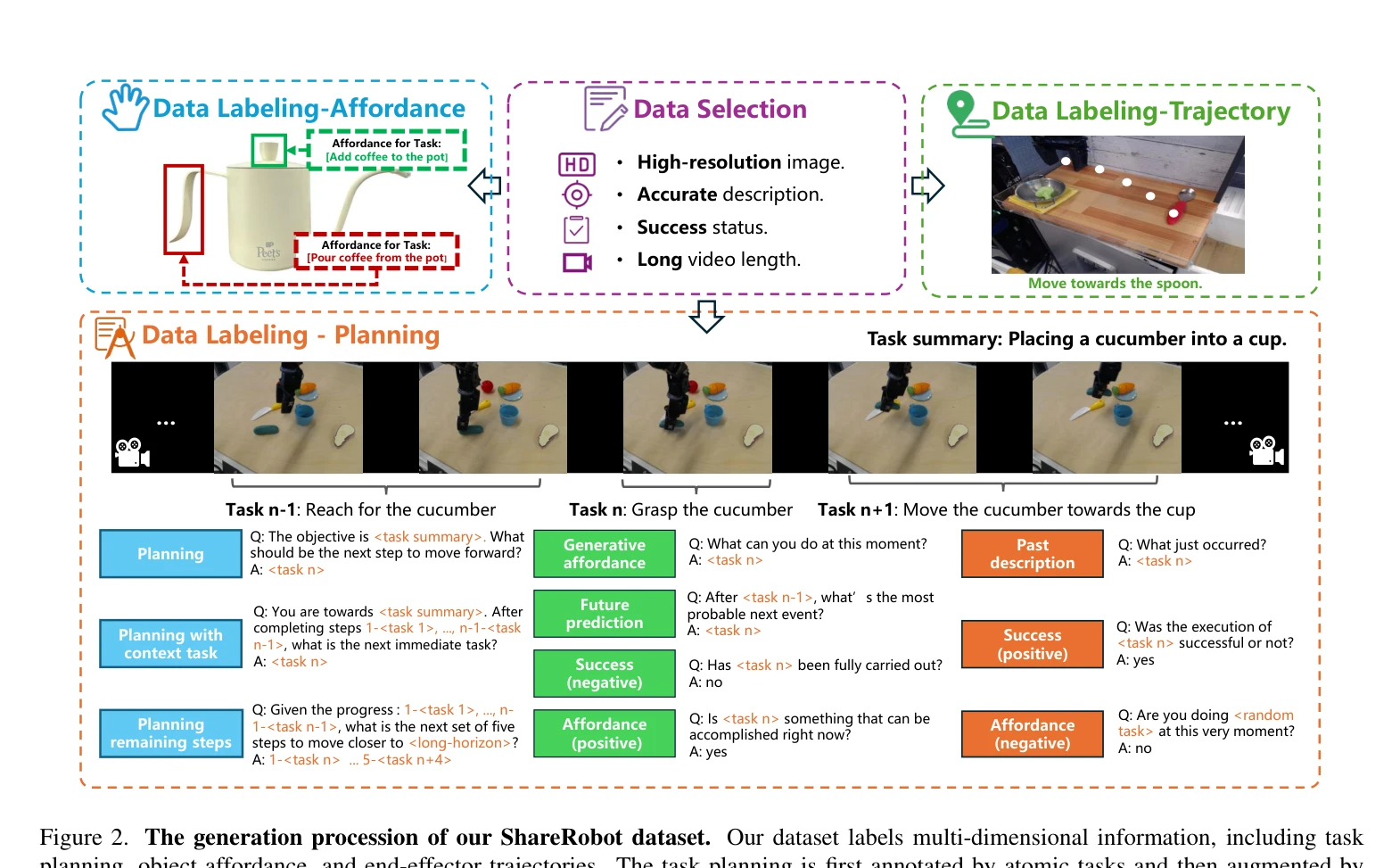
RoboBrain은 로봇 조작을 위해 Planning Capability, Affordance Perception, Trajectory Prediction의 세 가지 핵심 능력을 갖춘 통합 MLLM 모델이며, 이를 학습하기 위해 ShareRobot이라는 대규모 고품질 이질 데이터셋을 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: RoboBrain은 로봇 조작을 위한 세 가지 핵심 능력을 체계적으로 정의하고 이를 통합한 MLLM과 고품질 데이터셋을 함께 제시하여, 로봇 AI의 구체적 실행 능력 향상에 의미 있는 기여를 한다.