저자: Xiangtong Yao, Hongkuan Zhou, Oier Mees, Yuan Meng, Ted Xiao, Yonatan Bisk, Jean Oh, Edward Johns, Mohit Shridhar, Dhruv Shah, Jesse Thomason, Kai Huang, Joyce Chai, Zhenshan Bing, Alois Knoll | 날짜: 2023-12-17 | URL: https://arxiv.org/abs/2312.10807 📄 PDF
Essence
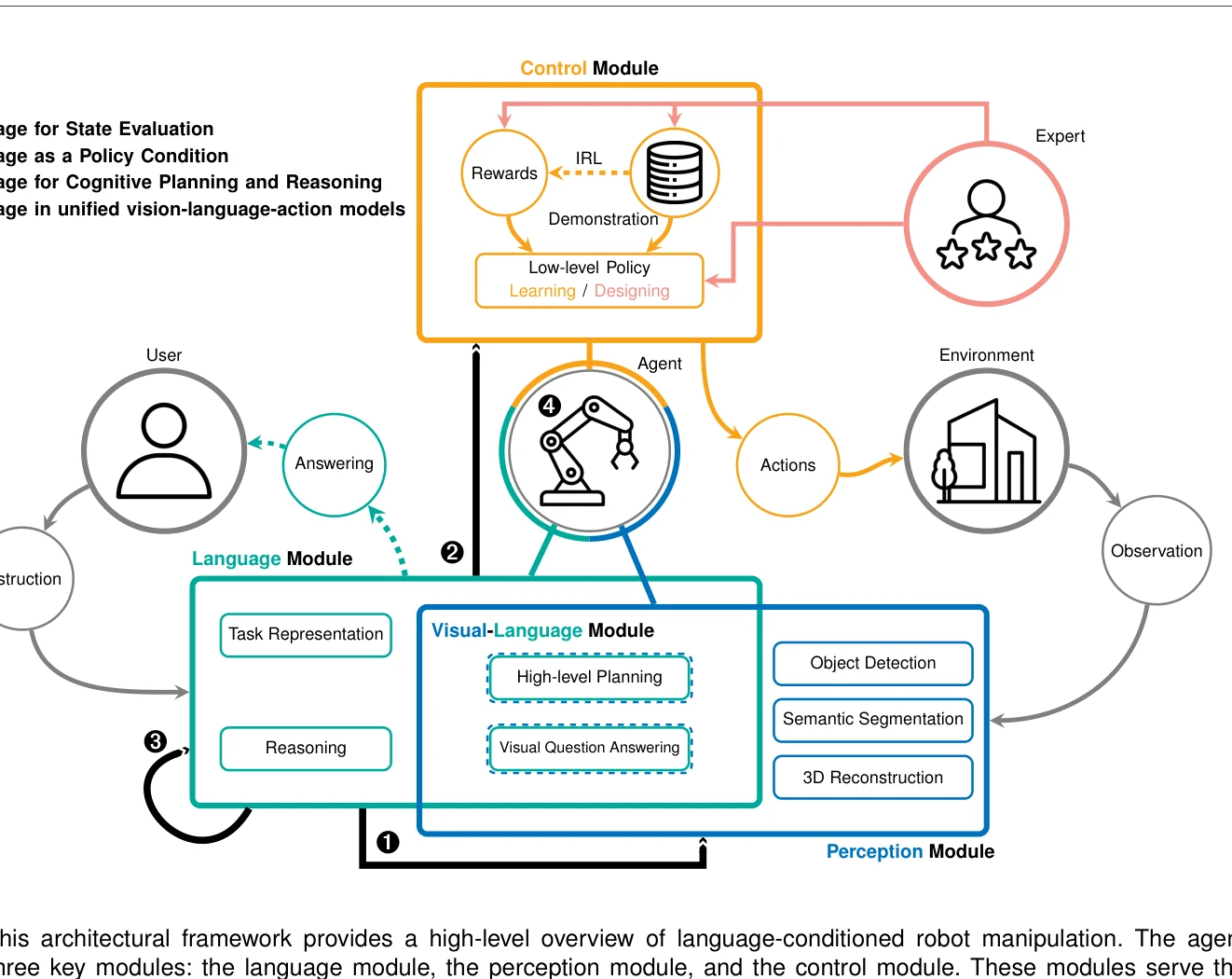
Figure 2. This architectural framework provides a high-level overview of language-conditioned robot manipulation. The ag
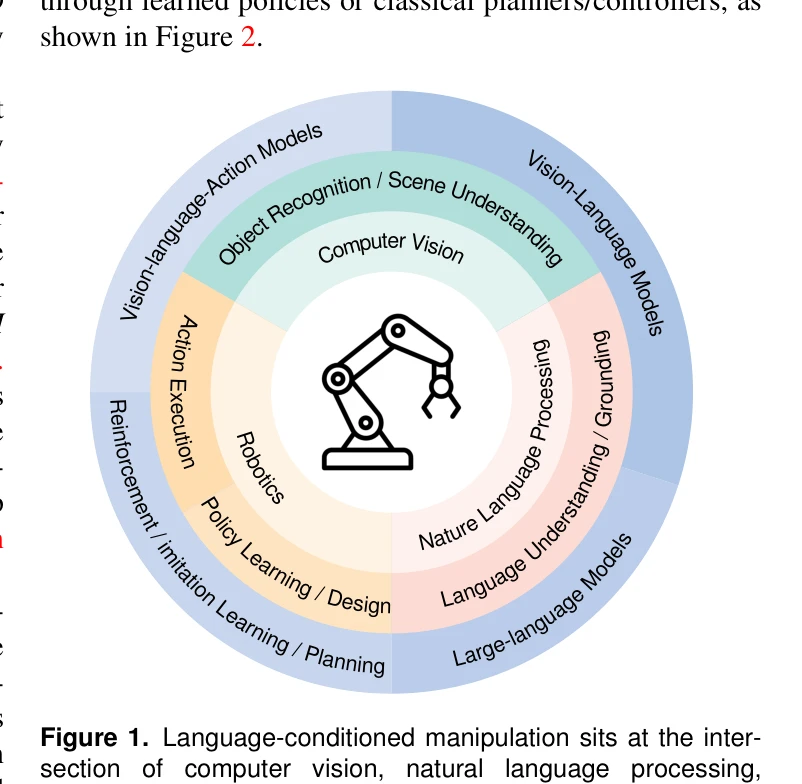
자연언어 지시를 로봇의 물리적 행동으로 변환하는 language-conditioned robot manipulation 분야를 체계적으로 조사한 종합 서베이 논문으로, 언어가 로봇 시스템에 통합되는 4가지 주요 방식을 분류하고 최신 기술을 분석한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 자연언어 기반 로봇 조작이라는 중요한 응용 분야를 최신 foundation models와 연계하여 종합적으로 정리한 높은 수준의 서베이로, 체계적인 분류와 명확한 아키텍처 프레임워크를 제시하여 향후 연구 방향을 제시한다.