Essence
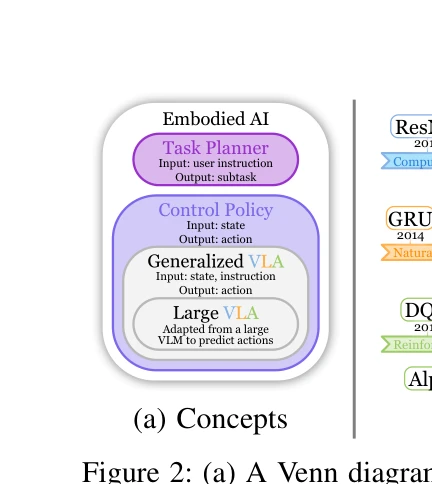
Figure 2: (a) A Venn diagram that outlines the main concepts in embodied AI discussed in this paper. (b) Timelines that
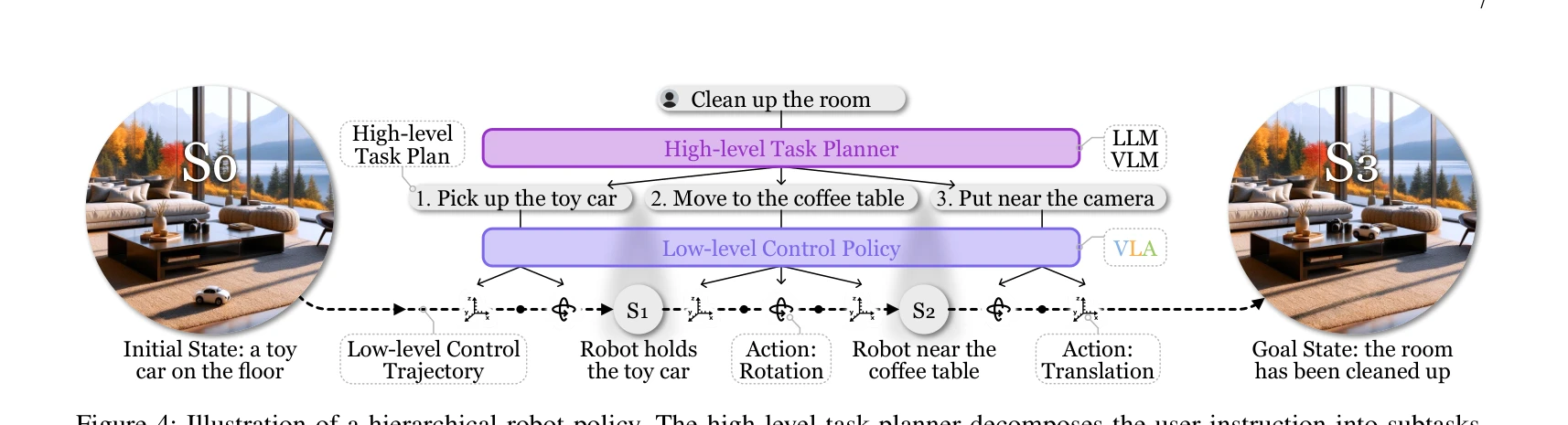
본 논문은 embodied AI 분야에서 vision, language, action 세 모달리티를 통합하는 vision-language-action models (VLAs)에 대한 첫 번째 종합 설문 논문이다. VLAs의 구성 요소, 저수준 제어 정책, 고수준 작업 계획자로 이루어진 3가지 주요 연구 라인을 체계적으로 분류하고 분석한다.