Essence
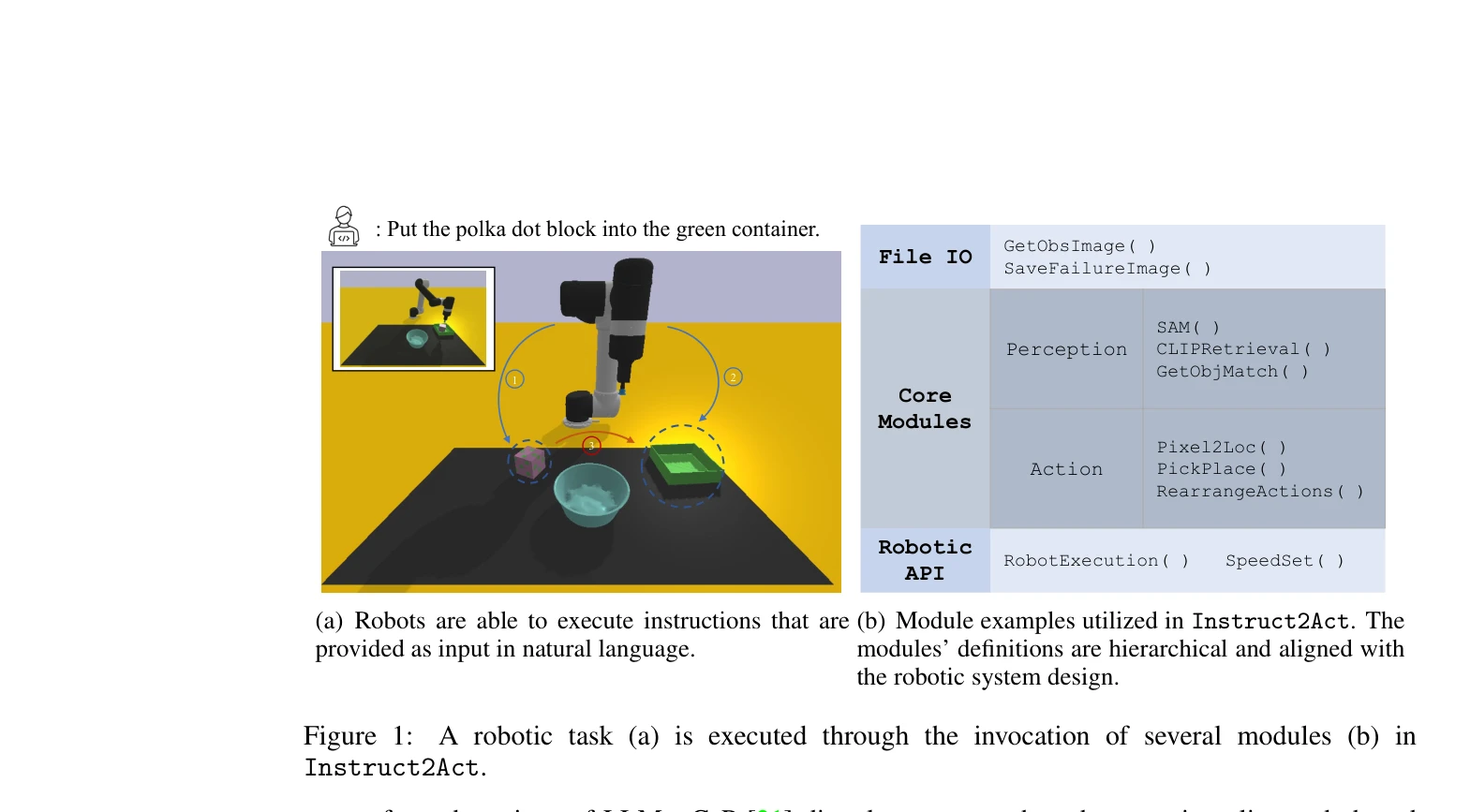
Figure 1:
본 논문은 Large Language Model(LLM)을 활용하여 자연언어 및 시각적 지시사항을 로봇 조작 작업의 순차적 행동으로 매핑하는 Instruct2Act 프레임워크를 제안한다. SAM과 CLIP 같은 기초 모델들을 API로 활용하여 인식, 계획, 행동 루프를 구현하는 Python 프로그램을 생성한다.
저자: Siyuan Huang, Zhengkai Jiang, Hao Dong, Yu Qiao, Peng Gao, Hongsheng Li | 날짜: 2023-05-18 | URL: https://arxiv.org/abs/2305.11176 📄 PDF
Figure 1:
본 논문은 Large Language Model(LLM)을 활용하여 자연언어 및 시각적 지시사항을 로봇 조작 작업의 순차적 행동으로 매핑하는 Instruct2Act 프레임워크를 제안한다. SAM과 CLIP 같은 기초 모델들을 API로 활용하여 인식, 계획, 행동 루프를 구현하는 Python 프로그램을 생성한다.
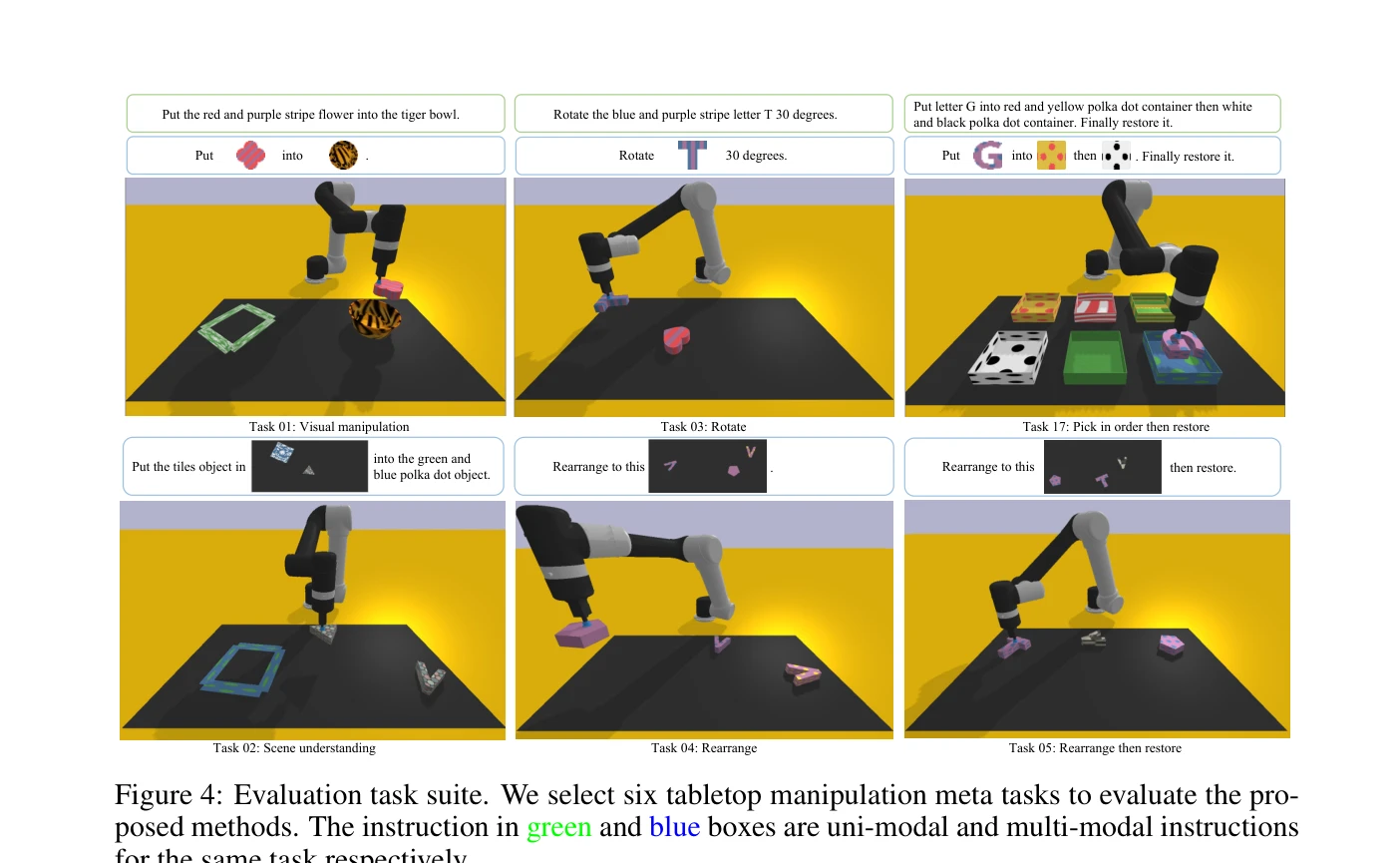
Figure 4: Evaluation task suite. We select six tabletop manipulation meta tasks to evaluate the pro-
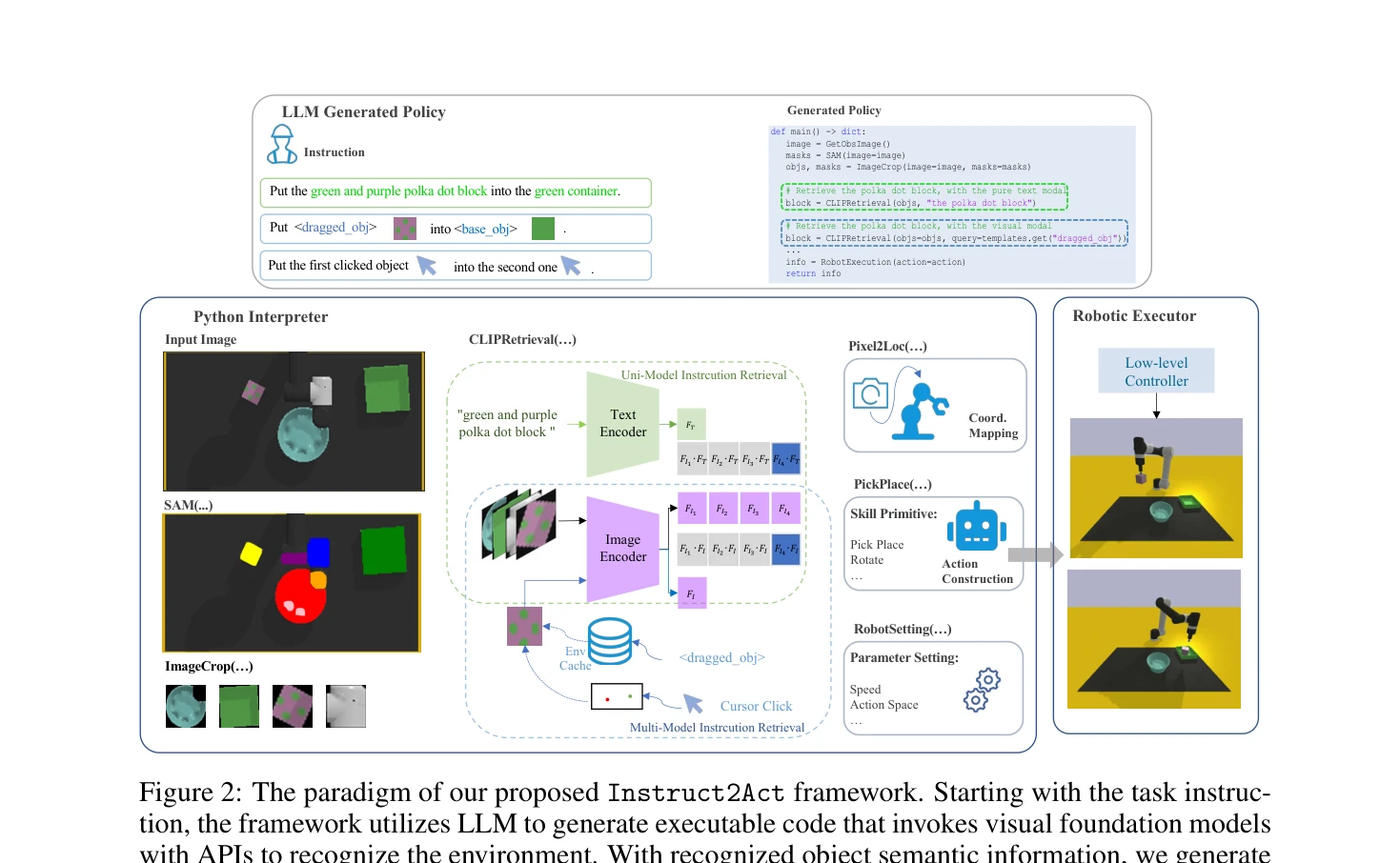
Figure 2: The paradigm of our proposed Instruct2Act framework. Starting with the task instruc-
총평: 본 논문은 LLM과 시각 기초 모델을 효과적으로 결합하여 멀티모달 지시사항을 로봇 행동으로 매핑하는 실용적인 프레임워크를 제시하며, 학습 없는 제로샷 방식으로 우수한 성능을 달성했다는 점에서 의의가 있다. 다만 평가 범위가 제한적이고 오류 전파 메커니즘에 대한 분석이 보완되어야 할 것으로 판단된다.