Essence
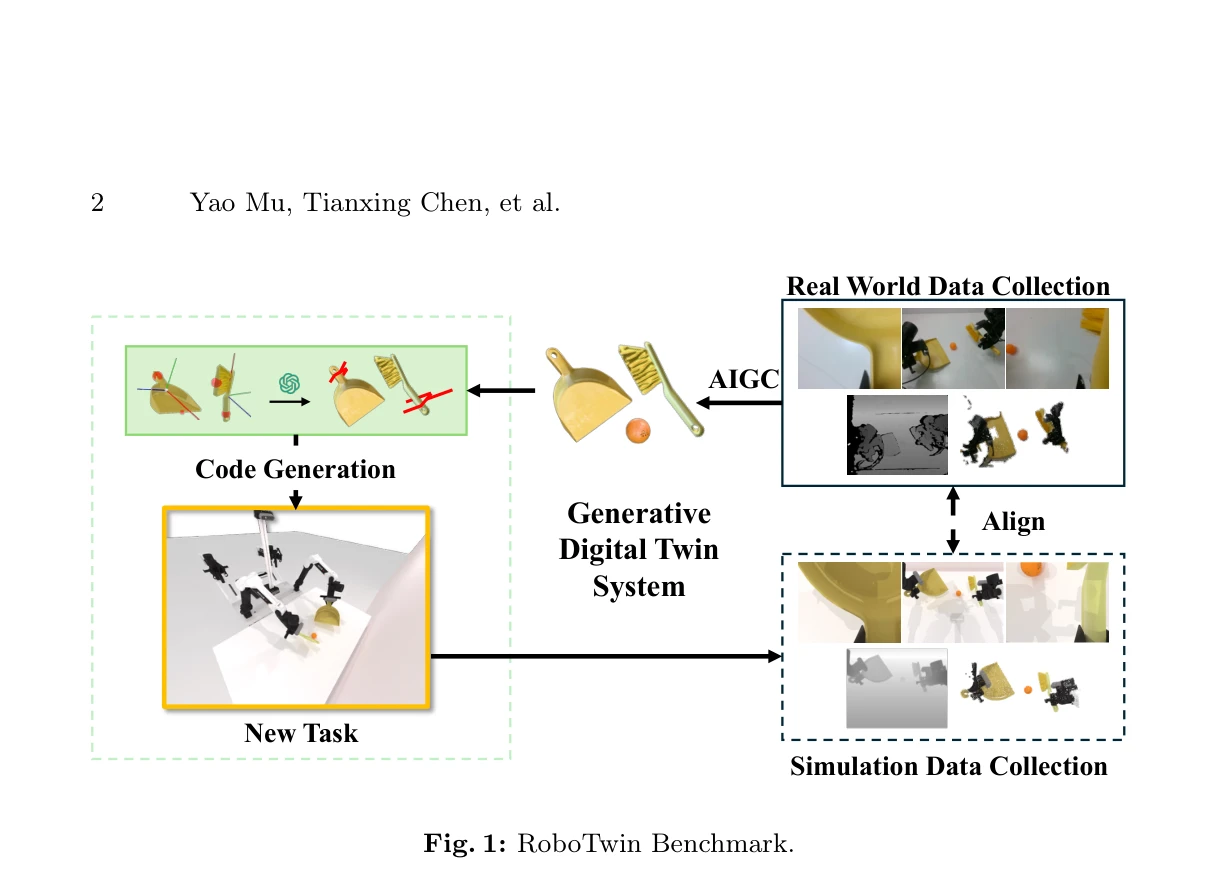
Fig. 1: RoboTwin Benchmark.
RoboTwin은 3D generative foundation model과 LLM을 활용한 generative digital twin 프레임워크로, 2D 이미지로부터 다양한 3D 객체 모델을 생성하고 dual-arm 로봇 작업을 위한 synthetic 데이터셋과 real-world-aligned 벤치마크를 제공한다.
저자: Yao Mu, Tianxing Chen, Shijia Peng, Zanxin Chen, Zeyu Gao, Yude Zou, Lunkai Lin, Zhiqiang Xie, Ping Luo | 날짜: 2024-09-04 | URL: https://arxiv.org/abs/2409.02920 📄 PDF
Fig. 1: RoboTwin Benchmark.
RoboTwin은 3D generative foundation model과 LLM을 활용한 generative digital twin 프레임워크로, 2D 이미지로부터 다양한 3D 객체 모델을 생성하고 dual-arm 로봇 작업을 위한 synthetic 데이터셋과 real-world-aligned 벤치마크를 제공한다.
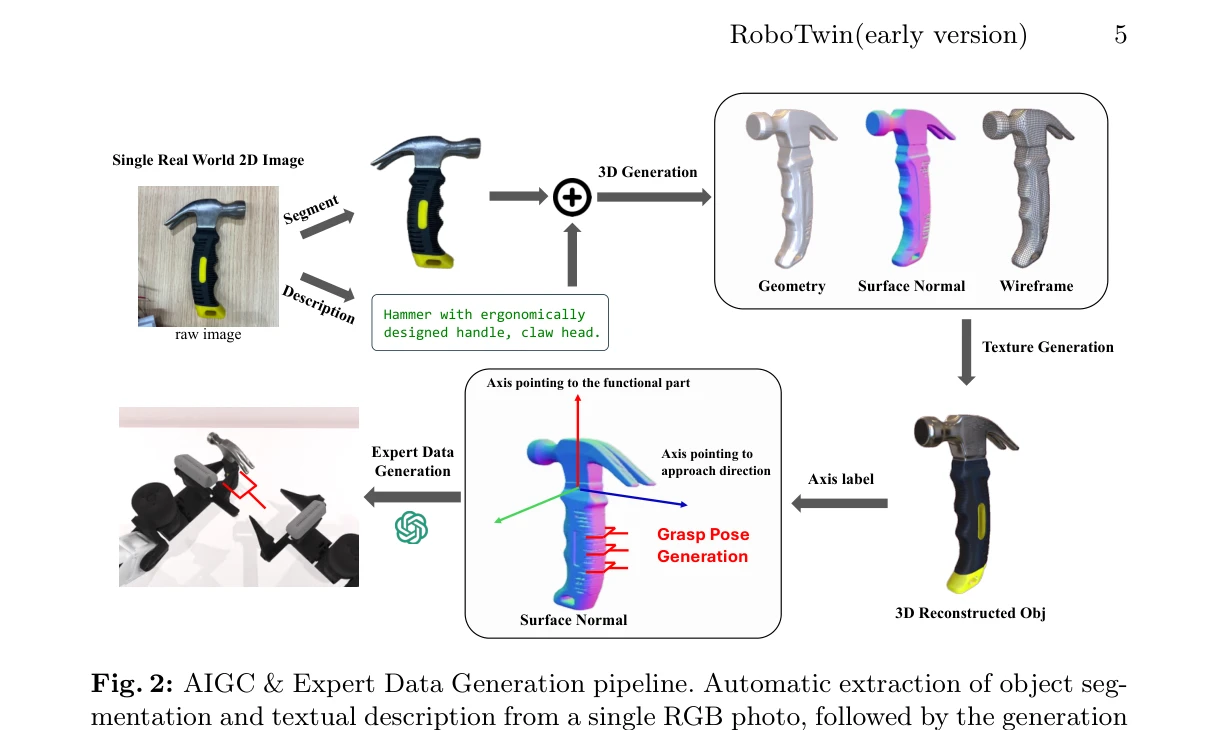
Fig. 2: AIGC & Expert Data Generation pipeline. Automatic extraction of object seg-
Fig. 2: AIGC & Expert Data Generation pipeline. Automatic extraction of object seg-
총평: RoboTwin은 AIGC와 LLM을 창의적으로 결합하여 dual-arm 로봇 학습을 위한 scalable data generation과 evaluation 프레임워크를 제시한 의미 있는 연구이다. 단일 이미지에서 digital twin을 생성하는 cost-effective 방식과 40-70% 성능 향상은 실용적 가치가 높으나, early version 단계에서 dataset 규모, 다양한 플랫폼 검증, LLM reliability에 대한 추가 연구가 필요하다.