저자: Yafei Hu, Quanting Xie, Vidhi Jain, Jonathan Francis, Jay Patrikar, Nikhil Keetha, Seungchan Kim, Yaqi Xie, Tianyi Zhang, Hao-Shu Fang, Shibo Zhao, Shayegan Omidshafiei, Dong-Ki Kim, Ali-akbar Agha-mohammadi, Katia Sycara, Matthew Johnson-Roberson, Dhruv Batra, Xiaolong Wang, Sebastian Scherer, Chen Wang, Zsolt Kira, Fei Xia, Yonatan Bisk | 날짜: 2023-12-14 | URL: https://arxiv.org/abs/2312.08782 📄 PDF
Essence
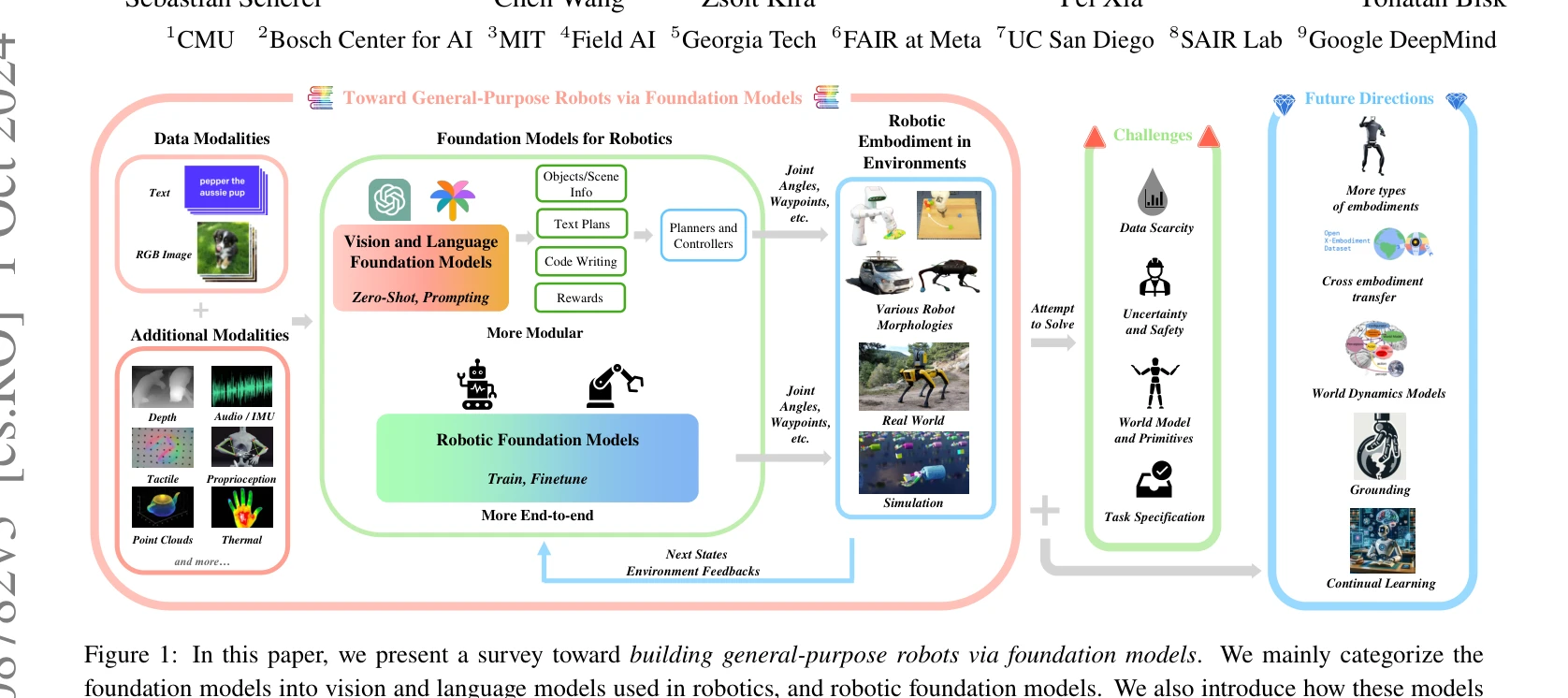
Figure 1: In this paper, we present a survey toward building general-purpose robots via foundation models. We mainly cat
이 논문은 NLP와 CV 분야의 foundation models를 로봇 공학에 적용하여 범용 로봇 시스템 개발을 가능하게 하는 방법을 탐구하는 종합 설문조사이며, 기존 vision/language foundation models의 활용과 robotics-specific foundation models의 설계를 다룬다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 로봇 공학에 foundation models를 적용하는 현황을 최초로 포괄적으로 정리한 중요한 설문조사로, 체계적인 택소노미와 명확한 도전 과제 분석을 제공하며, 향후 범용 로봇 개발을 위한 연구 로드맵을 제시한다.