Essence
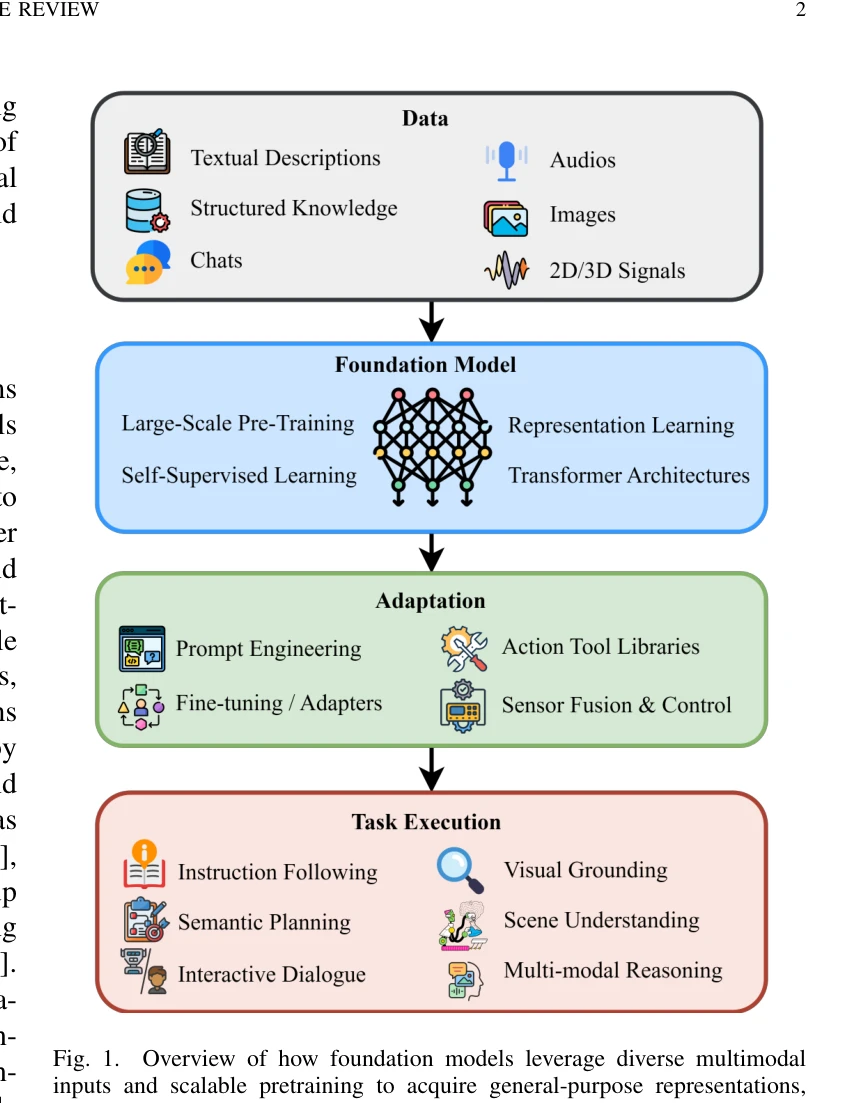
Fig. 1.
이 논문은 LLM과 VLM 같은 foundation model들이 로봇공학에 미치는 변혁적 영향을 체계적으로 분석하는 종합 리뷰로, 시뮬레이션, 실제 환경 실행, sim-to-real transfer, 적응형 로봇 등 다양한 응용 분야를 통합적으로 평가한다.
저자: Muhammad Tayyab Khan, Ammar Waheed | 날짜: 2025-07-14 | URL: https://arxiv.org/abs/2507.10087 📄 PDF
Fig. 1.
이 논문은 LLM과 VLM 같은 foundation model들이 로봇공학에 미치는 변혁적 영향을 체계적으로 분석하는 종합 리뷰로, 시뮬레이션, 실제 환경 실행, sim-to-real transfer, 적응형 로봇 등 다양한 응용 분야를 통합적으로 평가한다.
Fig. 1.
총평: 이 논문은 foundation model 기반 로봇공학의 현황을 가장 포괄적으로 정리한 종합 리뷰로, 기존의 단편적 기능 중심 평가를 넘어 시스템 수준의 통합과 실제 환경 적용 가능성을 균형있게 분석한다. 의미론적 강점과 embodiment 약점을 명확히 구분하여 미래 연구의 방향성을 제시한 점이 주요 기여이다.