Essence
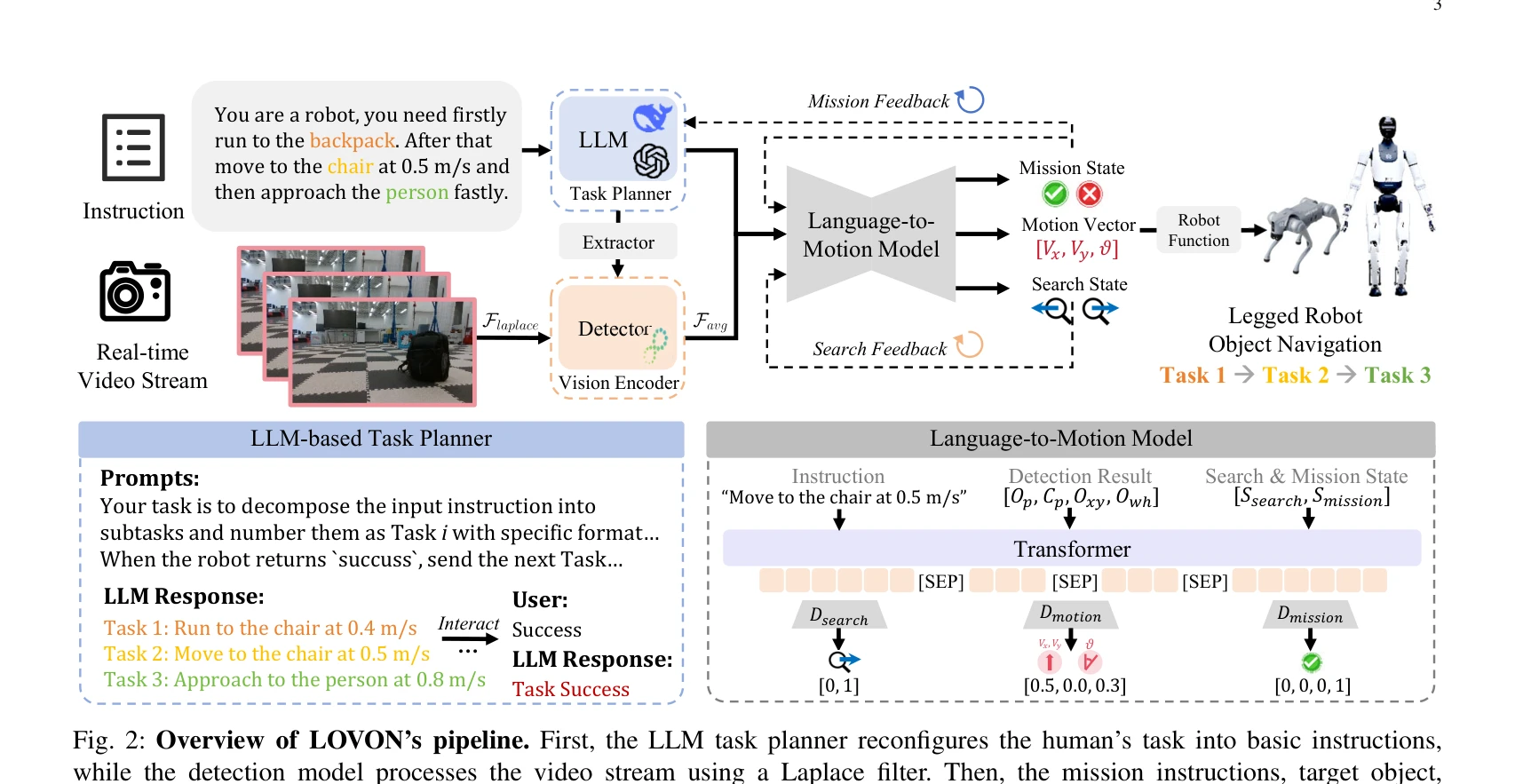
Fig. 2: Overview of LOVON’s pipeline. First, the LLM task planner reconfigures the human’s task into basic instructions,
LOVON은 LLM 기반 계층적 작업 계획과 open-vocabulary 시각 감지를 통합하여 동적이고 비구조화된 환경에서 legged robot의 장시간 객체 네비게이션을 가능하게 하는 통합 프레임워크이다. Laplacian Variance Filtering 등의 기법으로 실제 환경의 시각적 불안정성을 해결하고 여러 legged robot 플랫폼에서 검증되었다.
