Essence
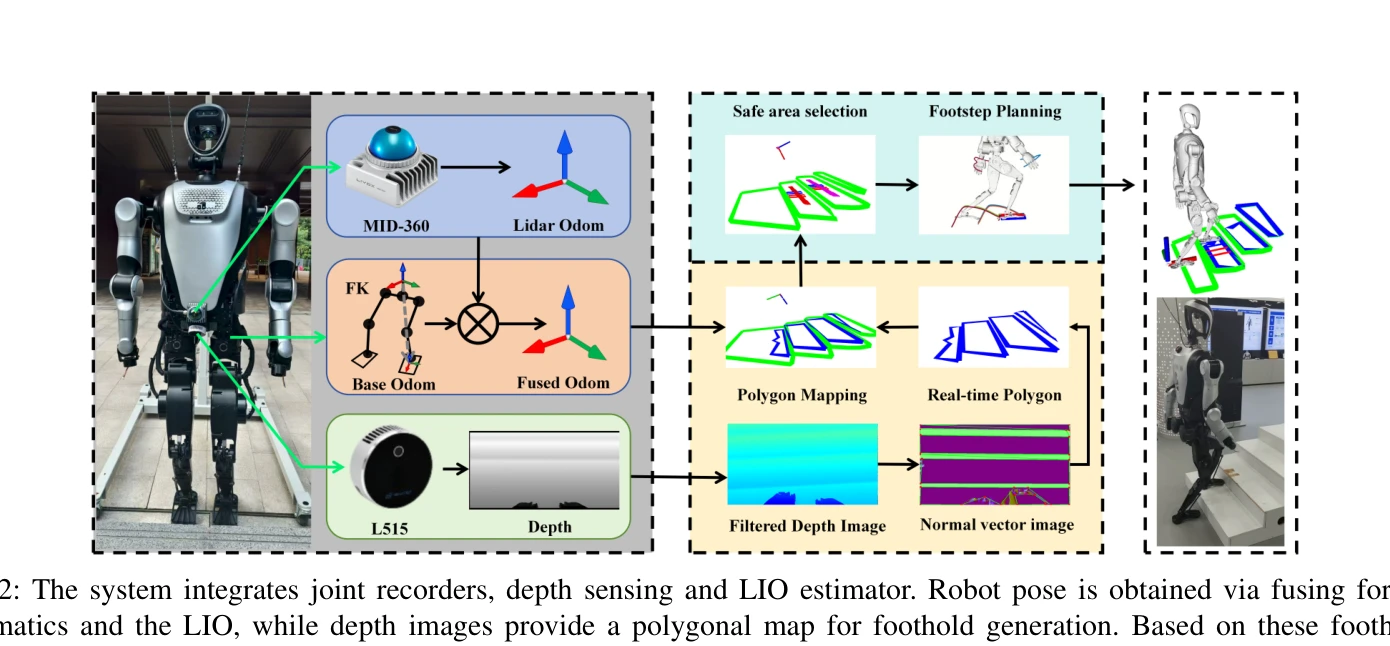
Fig. 2: The system integrates joint recorders, depth sensing and LIO estimator. Robot pose is obtained via fusing forwar
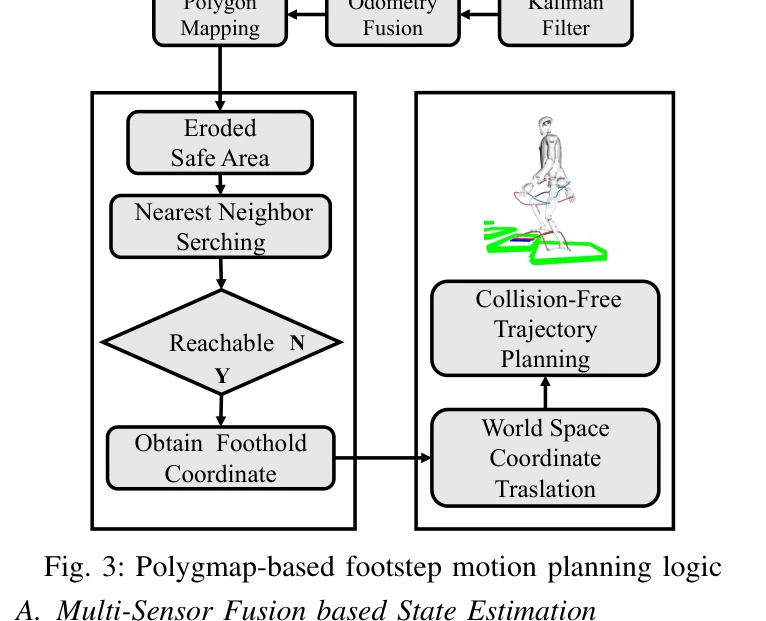
PolygMap은 LiDAR, RGB-D 카메라, IMU를 융합하여 실시간 다각형 계단 평면 의미지도를 구축하고, 이를 기반으로 인간형 로봇의 계단 등반을 위한 발디딤 계획을 수행하는 지각 기반 보행 계획 프레임워크이다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: PolygMap은 다중 센서 융합을 통해 계단 환경의 인식 불확실성을 효과적으로 대응하고, 실시간 의미지도 생성과 안전 제약 기반 발디딤 계획을 실현함으로써 인간형 로봇의 신뢰성 있는 계단 등반을 달성했다. 실제 환경 검증과 NVIDIA Orin 구현을 통해 실용성을 입증한 점에서 높은 가치가 있으나, 특정 표면 재질에 대한 견고성 개선과 더 높은 갱신률이 향후 과제이다.