저자: Yikai Wang, Tingxuan Leng, Changyi Lin, Shiqi Liu, Shir Simon, Bingqing Chen, Jonathan Francis, Ding Zhao | 날짜: 2026-02-11 | URL: https://arxiv.org/abs/2602.11143 📄 PDF
Essence
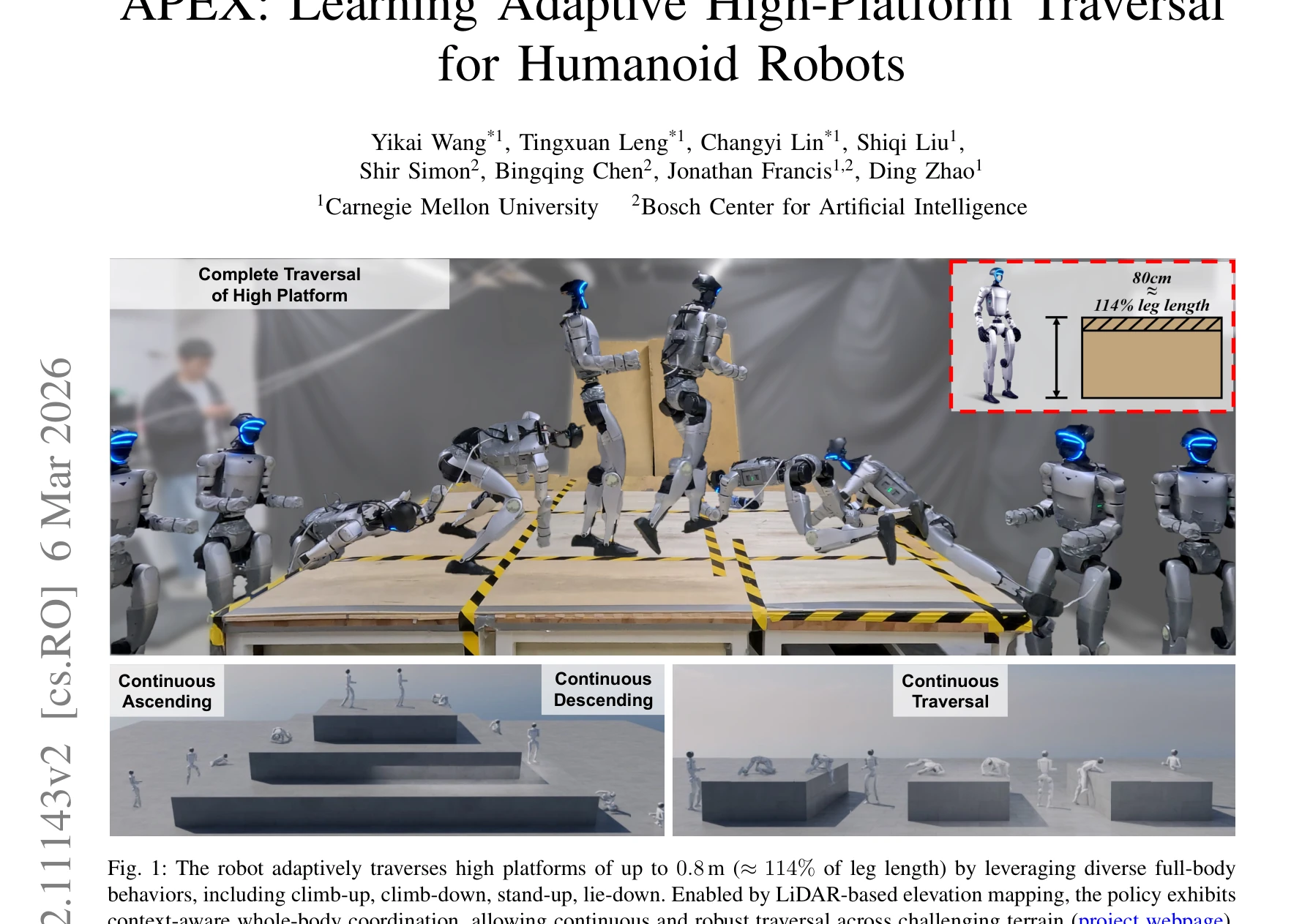
Fig. 1: The robot adaptively traverses high platforms of up to 0.8 m (≈114% of leg length) by leveraging diverse full-bo
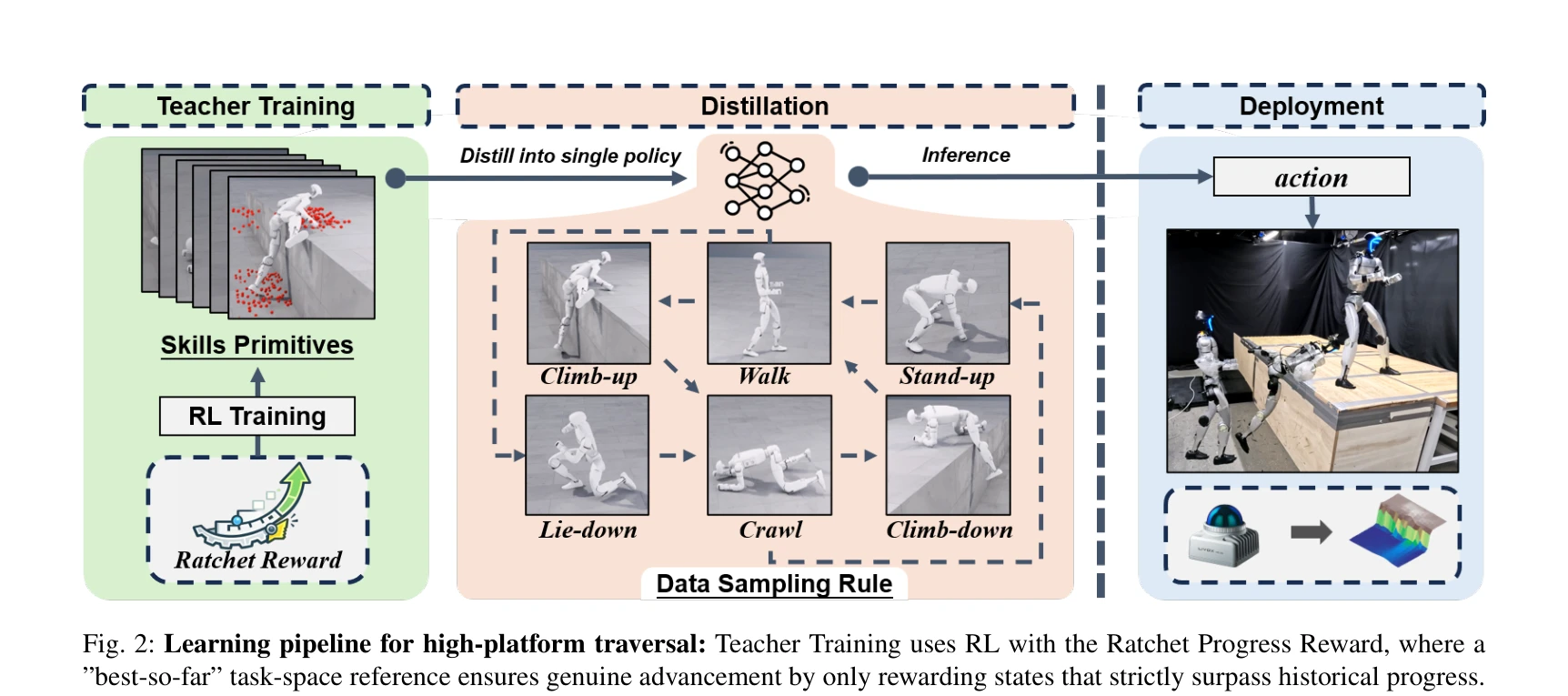
APEX는 humanoid 로봇이 다리 길이의 114%에 달하는 높은 플랫폼을 traversal할 수 있도록 하는 시스템으로, ratchet progress reward를 통해 학습한 6가지 기술(climb-up, climb-down, stand-up, lie-down, walking, crawling)을 하나의 정책으로 통합한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: APEX는 humanoid 로봇의 고플랫폼 traversal에 대한 실질적 해결책을 제시하는 논문으로, 새로운 ratchet progress reward 공식과 다중기술 통합 framework가 창의적이며, 실제 로봇에서 다리 길이의 114%에 달하는 높이를 달성한 점이 매우 인상적이다. 다만 평가 환경이 상대적으로 제한적이고 더 복잡한 실제 환경으로의 확장성에 대한 검증이 필요하다.